
한국로봇산업진흥원, ‘2026 휴머노이드 챌린지’ 성료
사진. 한국로봇산업진흥원 한국로봇산업진흥원이 산업통상부, 한국로봇융합연구원과 함께 개최한 '2026 휴머노이드 챌린지'가 전국 12개 대학팀의 경쟁 속에 마무리되며 휴머노이드 로봇의 제조 현장 적용 가능성을 확인했다. 산업통상부가 주최하고 한국로봇산업진흥

안정적으로 집어 조작 가능
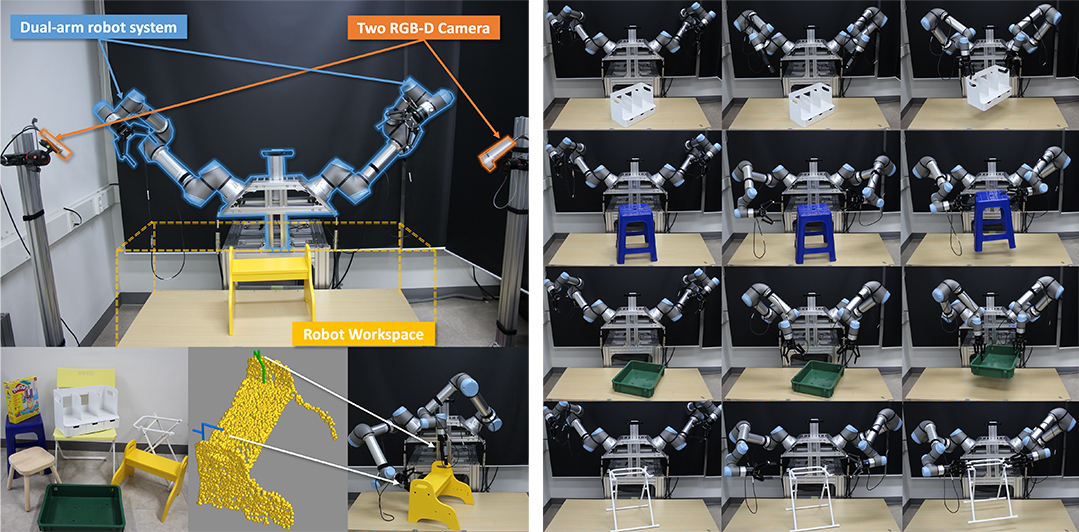
사진. 지스트
광주과학기술원(지스트)이 AI융합학과 이규빈 교수 연구팀이 사람처럼 두 팔을 함께 움직여 균형을 잡고 물체를 안정적으로 집어 조작할 수 있는 ‘AI 양팔 로봇 파지(Grasp, 집기)기술’을 개발했다고 밝혔다.
이 기술은 로봇이 물체를 잡을 때 두 팔의 움직임이 서로 충돌하거나 힘의 균형이 깨지면서 생기는 불안정성을 스스로 학습해 해결하고 안정적인 자세를 구현하는 것이 핵심으로, 향후 사람과 유사하게 상체를 활용해 물체를 조작하는 휴머노이드 로봇 연구 발전에도 기여할 것으로 기대된다.
사진. 한국로봇산업진흥원 한국로봇산업진흥원이 산업통상부, 한국로봇융합연구원과 함께 개최한 '2026 휴머노이드 챌린지'가 전국 12개 대학팀의 경쟁 속에 마무리되며 휴머노이드 로봇의 제조 현장 적용 가능성을 확인했다. 산업통상부가 주최하고 한국로봇산업진흥
사진. 휴머노이드 서밋 휴머노이드 로봇과 피지컬 AI 분야의 글로벌 행사인 휴머노이드 서밋(Humanoids Summit)이 오는 9월 22일(화)부터 9월 23일(수)까지 서울 코엑스에서 국내 첫 행사를 개최한다. 휴머노이드 서밋은 휴머노이드 로봇 공학과 피지컬 AI

사진. 한국로봇융합연구원 한국로봇융합연구원(KIRO)은 7월 3일 전북테크노파크에서 열린 협약식을 통해 전북테크노파크와 지역 로봇산업 육성 및 새만금 지구 활성화를 위한 업무협약(MOU)을 체결했다고 밝혔다. 이번 협약은 전북 로봇산업 경쟁력 강화와 새만금을 중심으로

대한민국 휴머노이드 로봇 전문 기업 에이로봇(AeiROBOT)과 한양대학교에리카 로봇공학과 연구실 HERoEHS(히어로즈랩, 지도교수 한재권) 연합팀이 세계 최고 권위의 로봇 대회에서 100% 자체 개발한 앨리스5로 참가하여 개최국의 자존심을 지켰다. 에이로봇&bull


(주)씨엠시스 박준우 대표이사 / 사진. 로봇기술 (주)씨엠시스는 산업용 모니터링 시스템인 체크박스 분야에서 오랜 기간 축적한 경험을 바탕으로 새로운 성장 기회를 모색하고 있다. 동사는 기존 독일 훼스토(Festo) 체크박스(Checkbox) 사업의 연속성을 원하는 시

국내 제조업계의 북미 생산거점 확대와 함께 현지 자동화 설비 수요도 빠르게 증가하고 있다. 자동차, 배터리, 반도체 등 주요 산업의 생산라인 구축이 본격화되면서 압축공기 공급 설비인 산업용 콤프레샤 역시 현지 인증과 신속한 유지보수 체계를 갖춘 공급망 확보가 중요한 과







