
UMA, 차세대 휴머노이드 로봇 비전 공개
사진. UMA 피지컬 AI 기업 UMA가 차세대 휴머노이드 로봇 디자인과 시연 기반 학습 AI 아키텍처를 공개하며 산업용 휴머노이드 시장 공략에 나섰다. UMA는 최근 마키나 서밋(Machina Summit)에서 자사의 첫 번째 휴머노이드 로봇 디자인을 공개하고, 수동

웨어러블 로봇 공학 및 재활 기술 개발에 도움될 것
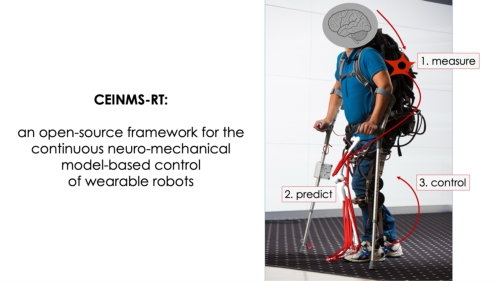
사진. University of Twente
University of Twente 마시모 사르토리(Massimo Sartori) 교수팀이 McGill University 및 Griffith University과 협력해 웨어러블 로봇 공학을 발전시키기 위해 설계된 오픈 소스 플랫폼인 CEINMS-RT를 개발했다.
이 플랫폼은 외골격, 엑소슈트 및 생체 공학적 팔다리와 같은 장치에 대한 실시간 신경 역학적 모델 기반 제어를 실현해 재활 및 움직임 증대를 위한 상당한 잠재력을 제공한다.
CEINMS-RT는 작업에 구애받지 않는 맞춤형 제어 기능을 제공해 웨어러블 기술 개발에 도움이 될 것으로 보고 있다. 이미 임상시험에서 성공을 입증했으며, 신경 장애가 있는 환자가 사지 통제력을 회복하도록 돕고 실시간 바이오피드백을 통해 최적화된 재활을 촉진한다.
플랫폼의 오픈 소스 특성은 인간-기계 인터페이스의 추가 혁신을 고무하기 위한 것이며, 향후 반복에는 근육 피로 모델링 및 관절 경직도 추정이 포함될 것으로 예상된다.
사진. UMA 피지컬 AI 기업 UMA가 차세대 휴머노이드 로봇 디자인과 시연 기반 학습 AI 아키텍처를 공개하며 산업용 휴머노이드 시장 공략에 나섰다. UMA는 최근 마키나 서밋(Machina Summit)에서 자사의 첫 번째 휴머노이드 로봇 디자인을 공개하고, 수동

사진. 원익로보틱스 원익로보틱스는 7월 8일부터 10일까지 일산 킨텍스에서 열린 제24회 국제 나노기술융합전시회(NANO KOREA 2026)에서 나노구조 기반 전방위 촉각센서를 적용한 차세대 지능형 로봇핸드 'Allegro Hand V5 Plus'로 산

사진. 서울시립대학교 서울시립대학교 기계정보공학과 황면중 교수가 지도하는 로보틱스연구실 소속 'UOS Robotics' 팀이 대한민국 인천 송도컨벤시아에서 열린 세계 최대 규모의 로봇 및 인공지능(AI) 대회인 'RoboCup 2026'의
사진. 나우로보틱스 지능형 로봇 전문기업 나우로보틱스가 글로벌 뷰티 브랜드 AHC에 패키징•물류 로봇 자동화 설비 공급 계약을 체결했다고 밝혔다. 이번 계약은 최근 글로벌 뷰티 기업 에이피알(APR)에 로봇 자동화 설비를 공급한 데 이은 연속 수주로, 나우로보


(주)씨엠시스 박준우 대표이사 / 사진. 로봇기술 (주)씨엠시스는 산업용 모니터링 시스템인 체크박스 분야에서 오랜 기간 축적한 경험을 바탕으로 새로운 성장 기회를 모색하고 있다. 동사는 기존 독일 훼스토(Festo) 체크박스(Checkbox) 사업의 연속성을 원하는 시

국내 제조업계의 북미 생산거점 확대와 함께 현지 자동화 설비 수요도 빠르게 증가하고 있다. 자동차, 배터리, 반도체 등 주요 산업의 생산라인 구축이 본격화되면서 압축공기 공급 설비인 산업용 콤프레샤 역시 현지 인증과 신속한 유지보수 체계를 갖춘 공급망 확보가 중요한 과







