
삼성물산, AI·로봇·시니어 기술 스타트업 6곳과 사업화 검증
삼성물산 건설부문(이하 삼성물산)은 7월 8일, 오픈이노베이션 프로그램 '2026 FutureScape'의 실증 협업을 위한 킥오프미팅을 개최했다. 삼성물산과 '2026 FutureScape' 실증 협업에 참여하는 스타트업 관계자들 / 사진

추후 뛰어난 환경 인식 기술 개발 진행 예정
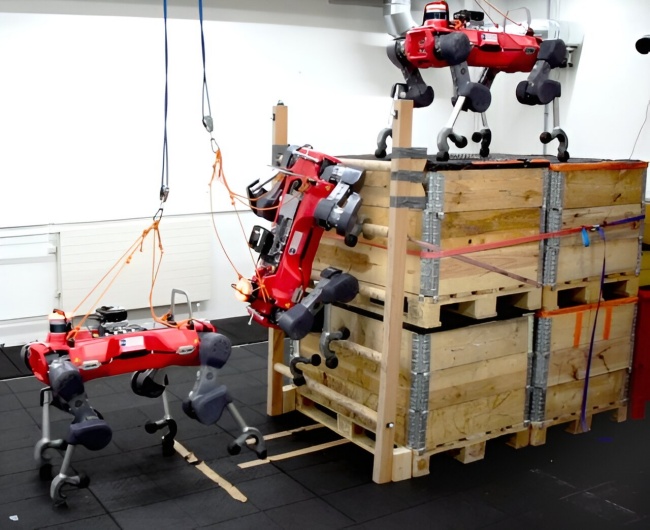
스위스 취리히 연방공대가 사다리를 자유자재로 오르는 사족보행기술을 개발했다 / 사진. ETH Zurich
스위스 취리히연방공대(ETH Zurich)는 로봇시스템즈랩(Robot Systems Lab) 연구팀이 사다리를 자유자재로 오르는 사족보행로봇 기술을 개발했다고 밝혔다.
연구팀은 “사족보행로봇이 산업 시설 점검 등 다양한 분야 활용에 투입되고 있으나, 산업용 시설에 산재하는 사다리 구조물을 통과하는 것에 효율적인 동작을 구현하지 못했다”라며 이번 연구 진행 배경을 설명했다. 해당 연구는 출판 전 논문 공개 사이트 ‘아카이브(arXiv)’에 게재됐다.
연구팀은 끝부분이 구부러져 있는 EOAT를 로봇 다리에 장착해 로봇이 사다리를 능숙하게 오르는 기술을 공개했다. EOAT는 로봇이 사다리를 오를 때 힘의 적절한 분산과 미끄러짐 방지에 도움을 준다.
또한, 연구팀은 ‘Privileged Teacher-Student Reinforcement Learning Approach’ 학습을 활용해 시뮬레이션 상에서 로봇을 학습했다. 로봇은 90% 확률의 사다리 오르기 성공률을 보였다.
연구팀 관계자는 “해당 기술을 통해 사족보행로봇이 안정적이고 더욱 빠른 속도로 사다리를 오를 수 있다는 사실을 확인했다”라며, “향후 카메라나 3D비전 등 외부 시스템 활용 방식보다 더욱 뛰어난 환경 인식 기술 개발을 진행할 것”이라고 전했다.
삼성물산 건설부문(이하 삼성물산)은 7월 8일, 오픈이노베이션 프로그램 '2026 FutureScape'의 실증 협업을 위한 킥오프미팅을 개최했다. 삼성물산과 '2026 FutureScape' 실증 협업에 참여하는 스타트업 관계자들 / 사진

사진. 한국로봇융합연구원 산업통상부가 주최하고 한국로봇융합연구원과 한국로봇산업진흥원이 공동 주관한 2026 휴머노이드 챌린지가 지난 7월 2일부터 3일까지 인천 송도컨벤시아에서 성황리에 개최됐다. 이번 대회는 인공지능(AI) 기술 발전과 함께 미래 제조 혁신의 핵심 기

사진. UMA 피지컬 AI 기업 UMA가 차세대 휴머노이드 로봇 디자인과 시연 기반 학습 AI 아키텍처를 공개하며 산업용 휴머노이드 시장 공략에 나섰다. UMA는 최근 마키나 서밋(Machina Summit)에서 자사의 첫 번째 휴머노이드 로봇 디자인을 공개하고, 수동

사진. 원익로보틱스 원익로보틱스는 7월 8일부터 10일까지 일산 킨텍스에서 열린 제24회 국제 나노기술융합전시회(NANO KOREA 2026)에서 나노구조 기반 전방위 촉각센서를 적용한 차세대 지능형 로봇핸드 'Allegro Hand V5 Plus'로 산


(주)씨엠시스 박준우 대표이사 / 사진. 로봇기술 (주)씨엠시스는 산업용 모니터링 시스템인 체크박스 분야에서 오랜 기간 축적한 경험을 바탕으로 새로운 성장 기회를 모색하고 있다. 동사는 기존 독일 훼스토(Festo) 체크박스(Checkbox) 사업의 연속성을 원하는 시

국내 제조업계의 북미 생산거점 확대와 함께 현지 자동화 설비 수요도 빠르게 증가하고 있다. 자동차, 배터리, 반도체 등 주요 산업의 생산라인 구축이 본격화되면서 압축공기 공급 설비인 산업용 콤프레샤 역시 현지 인증과 신속한 유지보수 체계를 갖춘 공급망 확보가 중요한 과







