퍼씨엠, 대한기계학회 경남지회 학술대회서 'MELSOFT Gemini' 공개
사진. 퍼씨엠 퍼씨엠이 대한기계학회 경남지회 춘계학술대회에 참가해 디지털 트윈 기반 시뮬레이션 소프트웨어 'MELSOFT Gemini'를 선보이며 기계설계 분야의 디지털 전환(DX)과 피지컬 AI 구현 방안을 제시했다. 퍼씨엠은 6월 25일(목)부터 6월

장수풍뎅이 날개 펼침 원리와 날개 접힘의 충격 완화 기능 밝혀
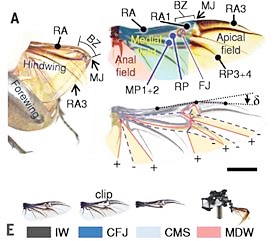
그림 1. 장수풍뎅이 뒷날개: (A) 접힌 모습과 펼쳐진 모습, (E) 실험에 사용한 날개 (사진. 건국대학교)
건국대학교 KU융합과학기술원 박훈철 교수팀(스마트운행체공학과)이 장수풍뎅이의 날개 펼침 원리를 규명하고, 날갯짓 하는 날개의 바깥 부분이 장애물과 충돌하는 경우 바깥쪽 날개의 접힘으로 충격을 완화해 비행을 지속할 수 있게 한다는 것을 실험적으로 입증했다.
또한 장수풍뎅이 뒷날개의 접힘-펼침을 모방한 인공 날개를 곤충모방 날갯짓 비행로봇에 장착해 날갯짓 비행 중에 바깥 날개가 장애물과 충동해도 지속적인 비행이 가능하게 했다. 이 연구 성과는 과학 분야 최고 권위 학술지 중 하나인 사이언스(Science)지 12월 4일 온라인 판에 게재됐다.
곤충 중에서 유일하게 풍뎅이는 뒷날개를 펼쳐서 비행하고 접어서 육상 또는 수중에서 기동한다. 이러한 풍뎅이의 뒷날개 펼침과 접힘 과정은 그동안 몇 가지 원리로 설명돼 왔지만, 뒷날개가 완전히 펼쳐지는 과정에 대해서는 명확한 설명이 부족했다. 이번 연구에서는 장수풍뎅이의 날개를 큰 각도의 날갯짓을 발생할 수 있는 날갯짓 장치에 장착하고, 이를 장수풍뎅이의 날갯짓 주파수인 38Hz로 구동하면서 디지털 초고속 카메라로 촬영해 접혔던 날개가 날갯짓 초반에 공기력과 관성력으로 완전히 펼쳐짐을 설명했다.
그림 1A는 장수풍뎅이의 뒷날개 구조와 접힌 형태를 도시하고, 그림 1E는 실험에 사용한 세가지 날개와 날갯짓 장치에 장착된 날개를 보여준다. 날개의 접힘부를 제거한 경우에는(그림 1E 두 번째) 날개의 접힘 형태를 유지할 수 없었고, 날개의 막이 모두 제거된 경우에는(세 번째) 날갯짓을 더 많이 해야 날개가 완전히 펼쳐졌다. 이로써 초기 날갯짓으로 발생하는 관성력과 공기력이 날개를 완전히 펼치는 원천임을 입증했다.
이와 같은 장수풍뎅이의 날개 접힘과 펼침은 비행 전후의 기동 모드 변환 때에만 유용한 것으로 알려져왔다. 그림 2에서와 같이, 장수풍뎅이가 비행 중에 날갯짓 하는 날개가 장애물(수직으로 세워진 막대)과 충돌하는 경우에 대해 초고속 카메라로 촬영한 결과, 장애물이 몸체에 가까운 경우에는 펼쳐진 다리로 장애물을 붙잡고(C), 장애물이 안쪽 날개에 부딪히는 경우에는 충돌 후 추락하며(D), 장애물이 바깥쪽 날개에 부딪히는 경우에는 자세를 재조정해 다시 비행할 수 있음(E)을 밝혔다.
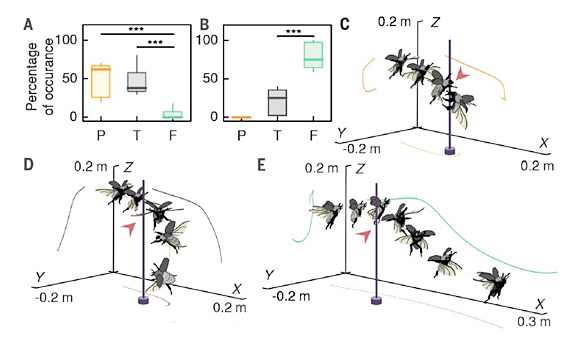
그림 2. 장수풍뎅이가 비행 중 장애물과 충돌하는 경우: (A) 장수풍뎅이가 비행 중에 날개 안쪽이 장애물과 부딪힌 경우, 장수풍뎅이는 대부분 장애물을 붙잡거나(P, perching) 추락함(T, tumble), (B) 날개 바깥쪽이 장애물과 충돌한 경우에는 대부분 비행을 계속할 수 있음 (F, flight), (C) 장수풍뎅이가 몸체 가까이에서 장애물과 충돌하는 경우의 거동, (D) 장수풍뎅이의 안쪽 날개가 장애물과 부딪히는 경우의 거동, (E) 장수풍뎅이의 바깥쪽 날개가 장애물과 부딪히는 경우의 거동 (사진. 건국대학교)
또한 이러한 장수풍뎅이의 날개 펼침-접힘 원리를 모사해 공학적으로 구현한 인공 날개를 그림 3에서와 같이 꼬리날개 없는 곤충모방 날갯짓 비행로봇에 장착했다. 이 비행로봇을 장수풍뎅이와 같은 방법으로 비행 시험해 이 비행로봇의 안쪽 날개가 장애물과 충돌하는 경우에는 장수풍뎅이와 마찬가지로 자세를 잃고 추락했으나(그림 4D), 바깥쪽 날개가 비행 중 장애물과 충돌하는 경우에는 자세에 큰 변동 없이 비행을 지속할 수 있었다(그림 4E). 이로부터, 바깥쪽 날개가 장애물에 충돌하는 경우에는 날개가 접히는 부분(그림 1A의 MJ, FJ)에서 충동 에너지를 흡수하고, 아주 짧은 시간 안에 다시 바깥쪽 날개가 펼쳐지게 해 날갯짓 비행을 지속할 수 있게 한다는 것을 증명했다.
박훈철 교수는 “이번 연구에서 개발한 장수풍뎅이 모방 날개를 장착하는 경우, 날갯짓 비행로봇들이 장애물에 부딪히는 경우에도 비행을 지속해 주어진 임무를 완수할 수 있는 가능성을 높일 수 있다”고 말했다.
이번 연구 성과는 건국대학교 Brainpool 지원사업과 한국연구재단 기초연구실지원사업(연구책임자: 정성남)의 부분적 지원으로 수행됐으며, 저자로는 박훈철 교수 연구실의 외국인 전임 조교수인 판호앙부 박사가 주저자 및 공동 교신저자, 박훈철 교수가 교신저자로 논문에 게재됐다.
사진. 퍼씨엠 퍼씨엠이 대한기계학회 경남지회 춘계학술대회에 참가해 디지털 트윈 기반 시뮬레이션 소프트웨어 'MELSOFT Gemini'를 선보이며 기계설계 분야의 디지털 전환(DX)과 피지컬 AI 구현 방안을 제시했다. 퍼씨엠은 6월 25일(목)부터 6월

사진. 브릴스 로봇 모듈화 플랫폼 솔루션 전문기업 브릴스가 한국거래소 코스닥시장 상장을 위한 예비심사를 통과하며 기업공개(IPO)에 속도를 낸다. 회사는 상장을 계기로 연구개발 투자와 글로벌 시장 확대를 본격화하며 자동화 솔루션 경쟁력 강화에 나설 계획이다. 브릴스는

사진. 한국로봇산업진흥원 산업통상부가 주최하고 한국로봇산업진흥원과 한국로봇융합연구원이 공동 주관하는 ‘2026 휴머노이드 챌린지’가 오는 7월 2일(목)부터 7월 3일(금)까지 인천 송도컨벤시아에서 열린다. 본 대회는 실전형 휴머노이드 경진대회로,

사진. 엔닷라이트 3D AI 기업 엔닷라이트가 아시아 최대 규모의 스타트업 페어인 ‘넥스트라이즈 2026(NextRise 2026)’ 현장에서 휴머노이드 로봇 전문기업 로브로스(대표 노승준)와 업무협약을 맺고, 휴머노이드 로봇 AI 학습 및 3D


사진. 비트랜스코리아 산업 설비 전문기업 비트랜스코리아는 물류 자동화 및 레이저 설비 분야로 사업 영역을 확대하며 제조 현장의 효율성을 높이는 원스톱 솔루션 기업으로 성장하고 있다. 동사는 해외 우수 제품의 공급부터 A/S·유지관리까지 직접 수행하며 경쟁력

종합 산업자동화 솔루션 기업으로의 도약을 천명한 (주)휴먼텍이 최근 비사출 분야의 대형 고객사와 갠트리 로봇 50대 규모의 대형 공급 계약을 체결했다. 특히 이번 프로젝트는 향후 단계적 증설이 이뤄질 경우 최대 250대 규모까지 확대될 수 있을 것으로 기대된다. 회사는