
한국공학대, ICROS 2026 4족보행로봇 경진대회 대상 수상
사진. 한국공학대학교 한국공학대학교가 '제2회 ICROS 2026 4족보행로봇 경진대회'에서 대상을 수상하며 자율보행 로봇 분야 경쟁력을 입증했다. 한국공학대학교는 지능형로봇 혁신융합대학사업단 소속 학부생 팀 '포포텍'이 7월 1일 대구 E

생체 조직 내에서 이동하는 로봇으로 조종되는 유연한 바늘

로봇으로 조종되는 유연한 바늘은 밀리미터 이하의 높은 정밀도로 생체 조직 내의 원하는 목표물에 도달할 수 있다. 이것은 모멘 아바야지드(Momen Abayazid)의 박사 학위 연구에 의하여 증명되었다. 모멘 아바야지드는 네덜란드의 트벤테 대(UT: University of Twente)에 위치한 생체의학 기술 및 의공학 연구 센터인 미라 연구소(research institute MIRA)에 소속되어 있다.
로봇으로 조종되는 유연한 바늘이 가지는 주요한 장점은 사용자가 이것을 사용할 때 장애물이나 민감한 생체 조직을 피할 수 있고, 바늘을 삽입하면서 실시간으로 그 경로를 변경할 수 있다는 것이다.
많은 진단 및 치료 과정에서 바늘은 생체 조직 검사 등을 수행할 때 부드러운 생체 조직에 삽입되거나, 전립선암과 싸우기 위하여 방사능 시드(radioactive seed)를 삽입하는데 사용된다. 이러한 시술 과정에서 많은 경우 바늘을 정확하게 위치시키는 것은 가장 중요하다. 보통 상대적으로 큰 지름을 가지는 경직된 바늘이 이러한 시술 과정에서 사용된다.
그러나 이처럼 경직된 바늘은 생체 조직에 삽입되었을 때 조종될 수가 없어서 임의의 장애물을 피할 수가 없다. 더욱이 생체 조직 및 기관들은 바늘이 삽입되는 동안에 변형된다. 결과적으로 경직된 바늘은 종종 목표물을 놓친다.
[비대칭 팁(tip)을 가지는 유연한 바늘]
트벤테 대(UT)는 비대칭 팁을 가지는 조정되는 유연한 바늘을 위하여 로봇 지원 시스템을 개발하였다. 이러한 유연한 바늘은 비대칭 팁을 가지기 때문에 생체 조직으로 삽입될 때 자연스럽게 굽혀진다.
삽입과정에서 사용자는 삽입과 회전으로 구성되는 일련의 과정을 수행하여 복잡한 3차원 경로 상에 유연한 바늘을 조종할 수 있다. 이 유연한 바늘은 로봇에 의하여 제어되며, 초음파 영상을 이용하여 실시간으로 추적된다. 이것은 밀리미터 이하의 높은 정밀도 수준으로 유연한 바늘의 경로를 조절하고 생체 조직을 통과하여 안내하도록 한다.
모멘 아바야지드의 박사 과정 연구는 유연한 바늘을 안내하는 로봇 시험대 및 제어 방법을 개발하고, 초음파 영상을 이용하여 3차원 바늘의 위치결정 알고리즘을 실현하는 것이 포함된다.
[임상적 활용을 위한 연구]
또한, 모멘 아바야지드는 임상적 활용의 수용성을 촉진하고, 로봇 시스템이 가지는 정밀도를 임상적 전문 지식과 결합하기 위하여 직접 환자를 상대하는 의사인 임상의가 사용할 수 있는 시스템을 개발하였다. 임상의는 이 시스템을 사용할 때 진동 및 시각적 피드백 등으로 제공되는 로봇 시스템의 안내 및 단서를 활용하여 바늘을 삽입한다.
이처럼 공유되는 제어 시스템의 덕택으로 미래에 환자와 멀리 떨어져 있는 임상의가 원격으로 바늘을 제어하게 될 가능성이 있다. 예를 들어, 연구자들은 이탈리아의 시에나(Sienna) 시에서 네덜란드의 엔스헤데(Enschede)에 위치한 바늘을 성공적으로 안내할 수 있을 것이다.
그리고 개발된 시스템은 초음파 기반의 유방 입체 자동 스캐너(ABVS: automated breast volume scanner)에 통합되었다. 연구자들은 개발한 시스템을 임상적으로 승인된 로봇화된 유방 입체 자동 스캐너(ABVS) 시스템과 결합함으로써 로봇화된 바늘은 연구실에서 수술실로 이동하는 것이 가능하게 되었다.
모멘 아바야지드의 연구는 개발된 시스템을 인간에게 적용하는 것이 기술적으로 준비되었음을 보여준다고 지도 교수인 사르삭 미스라(Sarthak Misra)가 전했다. 사르삭 미스라 교수는 3년 또는 4년 내에 최초의 임상적 시험이 시작될 것으로 기대한다.
모멘 아바야지드는 트벤테 대 미라 연구소의 생물 기계 공학과(Department of Biomechanical Engineering) 소속인 수술 로봇 공학 연구실(Surgical Robotics Laboratory)에서 연구를 수행하였다. 그는 2015년 8월 26일에 ‘로봇으로 조종되는 유연한 바늘(Robotically steering flexible needles)’이라는 제목의 박사 과정 논문을 심사 받을 예정이다.
[관련 논문의 서지 정보] Momen Abayazid, Claudio Pacchierotti, Pedro Moreira, Ron Alterovitz, Domenico Prattichizzo, Sarthak Misra, Experimental evaluation of co-manipulated ultrasound?guided flexible needle steering, The International Journal of Medical Robotics and Computer Assisted Surgery, first published online: 15 JUL 2015, DOI: 10.1002/rcs.1680
출처 KISTI 미리안 『글로벌동향브리핑』
사진. 한국공학대학교 한국공학대학교가 '제2회 ICROS 2026 4족보행로봇 경진대회'에서 대상을 수상하며 자율보행 로봇 분야 경쟁력을 입증했다. 한국공학대학교는 지능형로봇 혁신융합대학사업단 소속 학부생 팀 '포포텍'이 7월 1일 대구 E

FA Center / 사진. 나우로보틱스 지능형 로봇 전문기업 나우로보틱스가 2공장인 FA(Factory Automation) Center의 준공을 완료하고 본격적인 운영에 들어갔다고 밝혔다. 이번 준공으로 나우로보틱스는 기존 본사, 신규 FA센터, 충남 내포 생산거
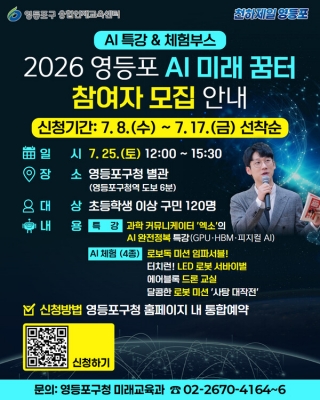
서울 영등포구(구청장 조유진)가 인공지능(AI)과 4차 산업혁명 시대를 이끌 미래 인재 양성을 위해 AI·로봇 과학 행사 'AI 미래꿈터'를 오는 7월 25일 개최하고 참가자를 모집한다. 2026 영등포 ‘AI 미래꿈터’

삼성물산 건설부문(이하 삼성물산)은 7월 8일, 오픈이노베이션 프로그램 '2026 FutureScape'의 실증 협업을 위한 킥오프미팅을 개최했다. 삼성물산과 '2026 FutureScape' 실증 협업에 참여하는 스타트업 관계자들 / 사진


(주)씨엠시스 박준우 대표이사 / 사진. 로봇기술 (주)씨엠시스는 산업용 모니터링 시스템인 체크박스 분야에서 오랜 기간 축적한 경험을 바탕으로 새로운 성장 기회를 모색하고 있다. 동사는 기존 독일 훼스토(Festo) 체크박스(Checkbox) 사업의 연속성을 원하는 시

국내 제조업계의 북미 생산거점 확대와 함께 현지 자동화 설비 수요도 빠르게 증가하고 있다. 자동차, 배터리, 반도체 등 주요 산업의 생산라인 구축이 본격화되면서 압축공기 공급 설비인 산업용 콤프레샤 역시 현지 인증과 신속한 유지보수 체계를 갖춘 공급망 확보가 중요한 과







