터크, 경사 스위치부터 IIoT 플랫폼까지 신제품 공개
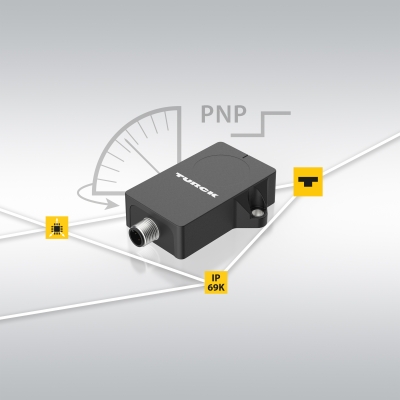
B1N180V-QR20 / 사진. 터크 산업 자동화 전문기업 터크(Turck)가 경사 스위치와 IO-Link 마스터, 유량 센서, 유도형 링 센서, IIoT 플랫폼 등 산업 현장의 디지털화와 스마트 자동화를 지원하는 신제품 및 솔루션을 잇달아 공개했다. 이번에 선보인

시속 46㎞의 세계에서 가장 빠른 로봇
<로봇기술> Technology Center1
시속 46㎞의 세계에서 가장 빠른 로봇
카이스트, ‘랩터 로봇(Raptor Robot)’ 개발!
<편집자주>
시속 46㎞, 세계에서 가장 빠른 로봇이 국내 연구진에 의해서 개발돼 화제다. 카이스트(KAIST) 연구진이 개발한 ‘랩터 로봇(Raptor Robot)’이라는 이름의 고속주행 로봇이 그 주인공. 이 로봇은 백악기에 생존했던 날렵한 육식공룡 밸로시랩터(Velociraptor)를 모방한 것으로 향후 군 정찰이나 민간 구조 영역서 활약이 기대되고 있다.
랩터 로봇, 시속 46㎞의 최고 주행속도를 자랑!
카이스트(KAIST) 연구진이 세계 최고 수준의 고속주행 로봇인 ‘랩터 로봇(Raptor Robot)’을 개발했다. 이 로봇은 백악기에 생존했던 날렵한 육식공룡 밸로시랩터를 모방한 것으로 고속 주행을 하면서도 다리와 꼬리를 이용해 균형을 잡을 수 있는 게 특징이다.
키는 대략 47㎝, 무게는 3㎏의 소형 로봇으로 연구진은 랩터 로봇의 최고 주행속도가 기존에 가장 빨랐던 미국 Boston Dynamics사의 Cheetah 로봇(45.5㎞/h)의 속도를 상회한 시속 46㎞이라고 밝혔다. 시속 46㎞는 100m를 약 7.8초에 달리는 속도다.
고속 주행을 하면서 균형을 잡는 것이 가능!
랩터 로봇의 큰 장점은 높이 10㎝ 장애물이 닥쳐도 쓰러지지 않고 균형을 유지할 수 있는 데 있다고 밝혔다.
개발팀인 기계공학과 MSC 연구실의 박종원 연구원은 “특히 자갈이나 바위 투성이의 험한 길에서도 빠른 속도로 이동할 수 있으려면 생물과 같은 다리를 가지고 뛰어난 균형 감각이 필요한데 랩터 로봇은 이 조건을 상당부분 충족시켰다”고 전했다.
연구진은 이 로봇이 비포장 도로에서도 빠르게 이동할 수 있기 때문에, 앞으로 군대에서의 정찰이나 보급품 수송, 민간에서의 인명구조 영역에서 활용할 수 있을 것으로 기대하고 있다.
물론 이번에 개발된 것은 어디까지나 시제품으로, 연구진은 로봇 개발을 완성하려면 앞으로 연구실 수준의 실험에서 벗어나, 다양한 실물지형에서의 환경 테스트를 통과해야 한다고 언급했다.
생체모방 로봇 개발에 주력!
기존의 로봇들이 대부분 사람의 걷는 속도보다 느린 것을 감안하면 굉장히 빠른 속도를 구현한 사례인 카이스트의 랩터로봇은, 생물의 내추럴한 모션과 균형감에 기반해 제작되어 갑작스런 장애물에도 몸의 균형을 유지하는 능력이 탁월하다.
이처럼 카이스트의 MSC 연구실에서는 생물의 신체나 행동상의 특징에서 영감을 받아 실용적으로 구현 가능한 로봇 기술을 개발하는 생체모방 로봇을 연구하고 있다.
현재 김수현 교수의 지도 아래 박종원(리딩 연구자), 이진이, 이진우 연구원 등이 연구에 참여하고 있다.
카이스트 www.kaist.ac.kr

<사진1> 랩터 로봇의 실제 형상

<사진2> 랩터 로봇의 형상

<사진3> 밸로시랩터를 모방한 랩터 로봇

<사진4> 랩터 로봇 연구진
<'월간 로봇기술' 7월호에 게재되었습니다.>
B1N180V-QR20 / 사진. 터크 산업 자동화 전문기업 터크(Turck)가 경사 스위치와 IO-Link 마스터, 유량 센서, 유도형 링 센서, IIoT 플랫폼 등 산업 현장의 디지털화와 스마트 자동화를 지원하는 신제품 및 솔루션을 잇달아 공개했다. 이번에 선보인

사진. LS일렉트릭 LS일렉트릭이 차세대 IPC 기반 제어 플랫폼 ‘SU-CM70’을 공개하며 Software Defined Automation 시대를 겨냥한 자동화 플랫폼 전략을 본격화했다. SU-CM70은 초고속·다축 모션 제어와
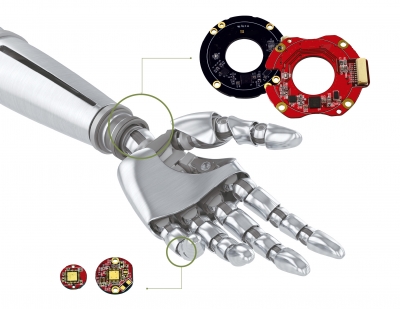
사진. 엔알티센서스 기존 엔코더 구조의 한계 개선 로봇 산업의 고도화와 함께 관절 단위의 정밀 제어 기술이 핵심 경쟁력으로 부상하며, 고해상도 엔코더에 대한 수요가 빠르게 증가하고 있다. 특히 휴머노이드 로봇에 대한 관심도 증가와 협동로봇의 확산으로 제한된 공간 내에서
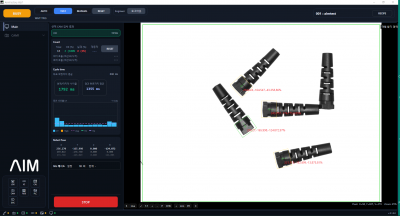
사진. 에이아이엠 자동화 솔루션 기업 에이아이엠(이하 AIM)이 로봇과 비전을 하나의 플랫폼으로 통합한 신규 소프트웨어 ‘AIMFactoryCore’를 앞세워 제조 자동화 시장 공략에 나선다. 기존 비전 중심 시스템에서 한 단계 확장된 구조를 통해


(주)씨엠시스 박준우 대표이사 / 사진. 로봇기술 (주)씨엠시스는 산업용 모니터링 시스템인 체크박스 분야에서 오랜 기간 축적한 경험을 바탕으로 새로운 성장 기회를 모색하고 있다. 동사는 기존 독일 훼스토(Festo) 체크박스(Checkbox) 사업의 연속성을 원하는 시

국내 제조업계의 북미 생산거점 확대와 함께 현지 자동화 설비 수요도 빠르게 증가하고 있다. 자동차, 배터리, 반도체 등 주요 산업의 생산라인 구축이 본격화되면서 압축공기 공급 설비인 산업용 콤프레샤 역시 현지 인증과 신속한 유지보수 체계를 갖춘 공급망 확보가 중요한 과







