터크, 경사 스위치부터 IIoT 플랫폼까지 신제품 공개
B1N180V-QR20 / 사진. 터크 산업 자동화 전문기업 터크(Turck)가 경사 스위치와 IO-Link 마스터, 유량 센서, 유도형 링 센서, IIoT 플랫폼 등 산업 현장의 디지털화와 스마트 자동화를 지원하는 신제품 및 솔루션을 잇달아 공개했다. 이번에 선보인

다양한 수술환경에서 집도의, 보조의 역할 수행
한국과학기술연구원(KIST) 바이오닉스 연구단과 연세대학교 세브란스 병원은 기존의 대형수술로봇으로는 적용할 수 없었던 ‘미세’한 수술영역에 적용이 가능한 차세대 미세수술용 능동 캐뉼라(Active Cannula) 로봇을 개발했다고 밝혔다.

능동 캐뉼라 로봇으로 기존 대형수술로봇의 한계 극복
캐뉼라는 의료 현장에 적용되는 금속으로 된 직선형 관이며, 능동 캐뉼라는 모터로 구동이 되어 조향(Steering), 즉 방향 조정이 가능하도록 한 것이다.
KIST에 따르면 이번에 발표된 능동 캐뉼라 로봇은 슬림화, 고강성화, 조향성 강화 및 소형화를 목표로 개발됐다.
인체내 삽입되는 부분의 외경이 4㎜급으로 매우 가늘며, 상하좌우로 90도 구부러짐이 가능한 동작 범위를 가져 기존의 직선형 수술도구로는 접근이 불가능했던 뇌의 깊숙한 영역까지 접근이 가능하도록 한 것이 특징이다.

고강성 조향 기구부 설명도

제1차 카데바 실험(2014년 6월 15일, 세브란스 병원)
미세 수술로봇, 슬림화·고강성화·조향성 강화
연구팀은 500g의 무게를 안정적으로 지지할 수 있는 견고한 고강성(High Stiffness) 조향 기구부도 개발했다. 이러한 동작 성능은 기존 미세 수술로봇들에서는 구현하기 힘들었던 기술이다.
연구팀은 로봇의 끝단에 종양조직을 적출할 수 있는 겸자(Forceps)를 장착했다. 수술 집도의의 양팔, 손목, 손가락 모션을 모방한 조종장치를 통해 로봇과 겸자를 자유롭게 조종할 수 있도록 하여 수술 도구의 방향 전환 성능을 강화한 것이다.
아울러 수술 집도의와 보조의간의 협업이 용이하도록 로봇 몸체를 소형화하여, 비좁은 수술환경에서 쉽게 이동, 설치가 가능하고, 의료진의 움직임을 방해하지 않고 수술을 보조하도록 설계했다.
카데바 실험 통해 활용성·기능성 개선
KIST 능동 캐뉼라 로봇이 실제 사용을 위해 협력한 곳은 연세대학교 세브란스 병원의 김선호 교수팀이다.
김선호 교수팀에서 실시하는 수술은 최소침습 뇌종양 수술이다. 이는 환자의 얼굴 중심부분에 위치한 뇌하수체 부근에 위치한 종양을 두개골의 절개 없이 코를 통하여 젓가락과 같이 가늘고 긴 수술도구를 넣어 종양을 제거하는 수술이다. KIST에서 개발한 미세 수술로봇은 수술 보조사로서, 기존의 수술도구로는 접근할 수 없었던 영역에 수술 로봇이 접근하여 의사의 양손을 대신하여 수술을 진행한다.
KIST와 연세대학교는 2014년 6월에 1차 카데바(사체) 실험을 수행한 후, 실제 수술에서 활용성과 기능성이 개선된 수술로봇으로 보완했으며, 이어 11월 2일 세브란스 병원에서 2차 카데바 실험을 진행했다.
KIST 강성철 박사는 “이번에 개발한 수술로봇은 콤팩트한 사이즈와 다자유도의 조향성능으로 인해 기존의 수술로봇을 사용할 수 없는 신경외과, 안과, 정형외과 등의 뇌수술, 척추수술, 안구수술 등 미세수술 영역에 광범위하게 사용 가능할 것으로 기대된다”며 “향후 협력연구와 임상실험을 통해 미세 수술로봇이 실제로 환자들에게 쓰일 수 있도록 노력하겠다”고 밝혔다.
본 수술로봇 연구에는 KIST 의공학연구소 바이오닉스 연구단의 강성철, 이우섭, 김계리 박사가 주관했고, 연세대학교 의과대학 세브란스 병원 신경외과의 김선호 교수와 KAIST 기계공학과의 권동수 교수가 공동으로 참여했다.

2차 플로토 타입 로봇을 이용한 뇌하수체 종양 수술 시연
(연세대학교 의과대학 세브란스 병원 김선호 교수)
한국과학기술연구원 www.kist.re.kr
B1N180V-QR20 / 사진. 터크 산업 자동화 전문기업 터크(Turck)가 경사 스위치와 IO-Link 마스터, 유량 센서, 유도형 링 센서, IIoT 플랫폼 등 산업 현장의 디지털화와 스마트 자동화를 지원하는 신제품 및 솔루션을 잇달아 공개했다. 이번에 선보인

사진. LS일렉트릭 LS일렉트릭이 차세대 IPC 기반 제어 플랫폼 ‘SU-CM70’을 공개하며 Software Defined Automation 시대를 겨냥한 자동화 플랫폼 전략을 본격화했다. SU-CM70은 초고속·다축 모션 제어와
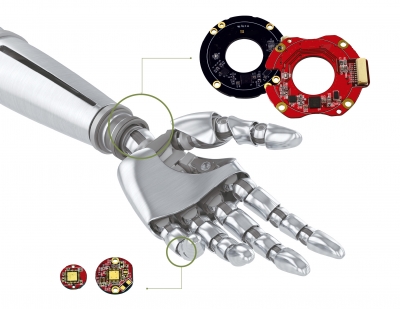
사진. 엔알티센서스 기존 엔코더 구조의 한계 개선 로봇 산업의 고도화와 함께 관절 단위의 정밀 제어 기술이 핵심 경쟁력으로 부상하며, 고해상도 엔코더에 대한 수요가 빠르게 증가하고 있다. 특히 휴머노이드 로봇에 대한 관심도 증가와 협동로봇의 확산으로 제한된 공간 내에서
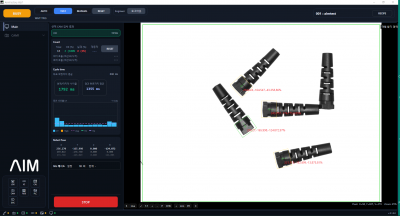
사진. 에이아이엠 자동화 솔루션 기업 에이아이엠(이하 AIM)이 로봇과 비전을 하나의 플랫폼으로 통합한 신규 소프트웨어 ‘AIMFactoryCore’를 앞세워 제조 자동화 시장 공략에 나선다. 기존 비전 중심 시스템에서 한 단계 확장된 구조를 통해


(주)씨엠시스 박준우 대표이사 / 사진. 로봇기술 (주)씨엠시스는 산업용 모니터링 시스템인 체크박스 분야에서 오랜 기간 축적한 경험을 바탕으로 새로운 성장 기회를 모색하고 있다. 동사는 기존 독일 훼스토(Festo) 체크박스(Checkbox) 사업의 연속성을 원하는 시

국내 제조업계의 북미 생산거점 확대와 함께 현지 자동화 설비 수요도 빠르게 증가하고 있다. 자동차, 배터리, 반도체 등 주요 산업의 생산라인 구축이 본격화되면서 압축공기 공급 설비인 산업용 콤프레샤 역시 현지 인증과 신속한 유지보수 체계를 갖춘 공급망 확보가 중요한 과







