LS일렉트릭, 차세대 제어 플랫폼 ‘SU-CM70’ 공개
사진. LS일렉트릭 LS일렉트릭이 차세대 IPC 기반 제어 플랫폼 ‘SU-CM70’을 공개하며 Software Defined Automation 시대를 겨냥한 자동화 플랫폼 전략을 본격화했다. SU-CM70은 초고속·다축 모션 제어와

내부 척추 없이 완전히 부드러운 움직임 자랑해 '눈길'
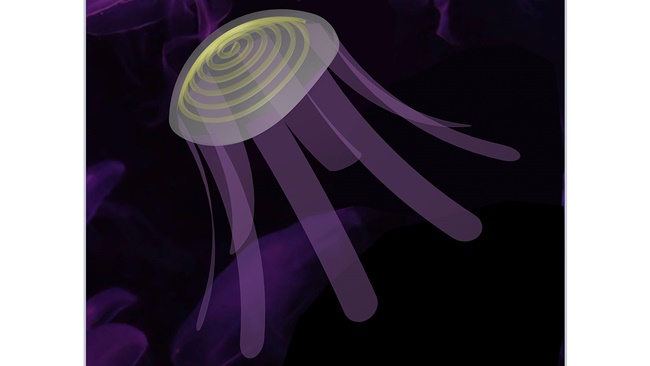
노스 캐롤라이나 주립 대학이 해파리 로봇을 개발해냈다. (사진. NC State)
노스 캐롤라이나 주립 대학(이하 NC State)과 템플 대학교의 공학 연구자들이 실제 해협을 능가 할 수 있는 해파리에서 영감을 얻은 소프트 로봇을 개발했다. 이들은 이전 연구에서 치타 영감을 얻은 소프트 로봇을 만드는 데 중점을 두어왔다. 그러나 해당 로봇은 매우 빠르지만, 여전히 뻣뻣한 내부 척추를 가진 바 한계가 있었다.
이에 연구진들은 내부 척추 없이 완전히 부드러운 로봇을 만들어냈다. 이들은 동일한 탄성 중합체의 두 개가 결합된 층으로 새로운 소프트 로봇을 제작, 한 층의 중합체에 미리 응력을 가하거나 신장시켰다. 또한 두 번째 층은 사전 응력을 받지 않았으며 공기 채널을 포함했다.
관계자는 “우리는 공기를 채널 층으로 펌핑함으로써 로봇을 유연하게 만들 수 있었다”라며, “프리스트레스된 층의 상대적 두께를 제어함으로써 그 플렉스의 방향 역시 제어할 수 있었다”고 전했다.
작동 방식은 중간층이라 불리는 제3응력이 없는 층과 결합될 때, 프리-스트레싱된 층은 특정 방향으로 이동하기를 원한다. 예를 들어 두 방향으로 잡아 당겨서 사전 응력을 받은 폴리머 스트립 조각이 있을 수 있는데, 프리스트레스된 재료를 중간층에 부착한 후 최종 결과는 찌푸린 얼굴과 같이 아래로 구부러지는 이중층 스트립이 될 것이다. 프리스트 레이싱된 층이라고도 하는 이 이중층 스트립이 공기 채널을 갖는 층보다 얇으면 공기가 채널 층으로 펌핑됨에 따라 찌푸린 곡선이 미소 곡선으로 구부러지게 된다. 그러나 프리-스트레스된 층이 채널 층보다 두껍다면 공기가 채널 층으로 펌핑됨에 따라 찌푸림이 점점 더 뚜렷해지게 된다.
실제로 이 간단한 예는 연구팀이 만든 소프트 로봇 중 하나인 소프트 크롤러를 설명할 수 있다. 그것은 몸을 컬링하는 애벌레 곤충과 흡사한데, 저장된 에너지를 빠르게 방출하면서 앞으로 점프한다. 이보다 더 복잡한 해파리 로봇은 프리스트레스된 디스크와 같은 층은 네 방향으로 뻗어 있고, 채널 층은 링형 공기 채널로 구성된다. 최종 결과는 해파리처럼 보이는 돔으로 형성된다.
해파리 로봇이 이완될 때 돔은 얕은 그릇처럼 구부러진다. 아울러 공기가 채널 층으로 펌핑 될 때 돔은 빠르게 구부러져 물을 밀어 내고 스스로 추진하게 된다. 실험 테스트에서 해파리 로봇의 평균 속도는 초당 53.3밀리미터로, 연구자들이 조사한 3가지 해파리 종 중 어느 것도 초당 평균 30밀리미터보다 빠르지 않은 것으로 나타났다.
사진. LS일렉트릭 LS일렉트릭이 차세대 IPC 기반 제어 플랫폼 ‘SU-CM70’을 공개하며 Software Defined Automation 시대를 겨냥한 자동화 플랫폼 전략을 본격화했다. SU-CM70은 초고속·다축 모션 제어와
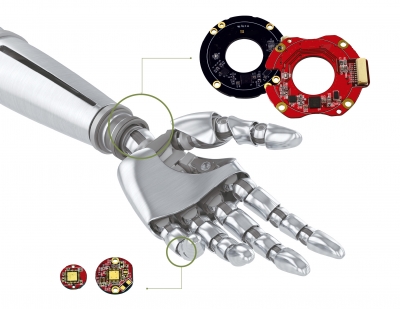
사진. 엔알티센서스 기존 엔코더 구조의 한계 개선 로봇 산업의 고도화와 함께 관절 단위의 정밀 제어 기술이 핵심 경쟁력으로 부상하며, 고해상도 엔코더에 대한 수요가 빠르게 증가하고 있다. 특히 휴머노이드 로봇에 대한 관심도 증가와 협동로봇의 확산으로 제한된 공간 내에서
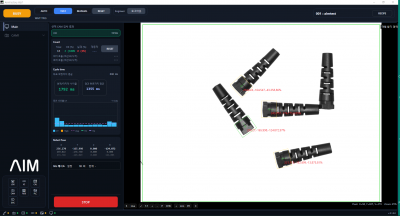
사진. 에이아이엠 자동화 솔루션 기업 에이아이엠(이하 AIM)이 로봇과 비전을 하나의 플랫폼으로 통합한 신규 소프트웨어 ‘AIMFactoryCore’를 앞세워 제조 자동화 시장 공략에 나선다. 기존 비전 중심 시스템에서 한 단계 확장된 구조를 통해

일체형 미니 델타로봇 시스템 / 사진. 로봇기술 고속 픽 앤 플레이스에 특화된 올인원 시스템 (주)아톰로봇코리아(이하 아톰로봇코리아)가 일체형 구조의 미니 델타로봇 시스템을 공개했다. 이 미니 델타로봇 시스템은 소형 델타로봇과 산업용 카메라, 소프트웨어 및 플렉시블 피


사진. 비트랜스코리아 산업 설비 전문기업 비트랜스코리아는 물류 자동화 및 레이저 설비 분야로 사업 영역을 확대하며 제조 현장의 효율성을 높이는 원스톱 솔루션 기업으로 성장하고 있다. 동사는 해외 우수 제품의 공급부터 A/S·유지관리까지 직접 수행하며 경쟁력

종합 산업자동화 솔루션 기업으로의 도약을 천명한 (주)휴먼텍이 최근 비사출 분야의 대형 고객사와 갠트리 로봇 50대 규모의 대형 공급 계약을 체결했다. 특히 이번 프로젝트는 향후 단계적 증설이 이뤄질 경우 최대 250대 규모까지 확대될 수 있을 것으로 기대된다. 회사는