터크, 경사 스위치부터 IIoT 플랫폼까지 신제품 공개
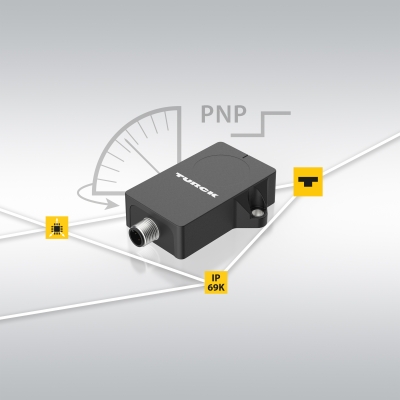
B1N180V-QR20 / 사진. 터크 산업 자동화 전문기업 터크(Turck)가 경사 스위치와 IO-Link 마스터, 유량 센서, 유도형 링 센서, IIoT 플랫폼 등 산업 현장의 디지털화와 스마트 자동화를 지원하는 신제품 및 솔루션을 잇달아 공개했다. 이번에 선보인

다지 로봇 핸드

■ 요약
본 발명에 따른 다지 로봇 핸드는 인체의 손 운동을 모사하기 위한 동력원으로서 복수의 소형모터가 구비되는 몸체부 및 상기 몸체부에 연결되어 모터동력에 의한 관절운동이 제어되는 5개의 손가락 관절부를 포함하는데, 상기 몸체부를 구성함에 있어, 베이스 플레이트, 상기 베이스 플레이트 위에 설치되어 회전동력을 발생하는 복수의 소형모터, 상기 소형모터의 회전동력을 전달하는 구동벨트 및 상기 베이스 플레이트의 선단에 설치되어 구동벨트와 연동되는 회전동력을 전달받고, 상기 회전동력이 손가락 관절부에 전달되도록 축 결합하는 관절 결합부를 포함하는 구성을 특징으로 한다.
본 발명은 링크 연결형 종속 메커니즘을 이용해 다지 로봇 핸드의 손가락 관절운동이 모사되도록 함으로써, 구조가 간단하면서도 적은 비용으로 사람의 손 운동을 모사한 다지 로봇 핸드를 제작할 수 있는 효과를 갖는다.
또한, 본 발명은 소수의 동력원만을 이용해 손가락 관절운동을 구동하는 구조여서, 간편한 제어구조를 갖는 효과가 있다.
 ■ 발명이 속하는 기술 및 그 분야의 종래기술
■ 발명이 속하는 기술 및 그 분야의 종래기술
본 발명은 다지 로봇 핸드에 관한 것으로서, 보다 상세하게는 링크 연결형 종속 메커니즘을 이용해 다지 로봇핸드의 손가락 관절운동이 모사되도록 함으로써, 구조가 간단하면서도 적은 비용으로 사람의 손 운동을 모사할 수 있도록 한 다지 로봇 핸드에 관한 것이다.
1980년 초부터 Stanford 대학/JPL, Utah/MIT대학, 일본 MEL 연구소 등 세계 각지에서 로봇 핸드에 대한 개발이 이루어지고 있는 실정이다.
Loucks 등은 로봇 손의 전반부에 장착한 구동 메커니즘에 연결된 tendon을 이용하여 4개의 관절로 구성된 4개의 손가락을 구동하는 Stanford/JPL hand를 개발한 바 있다.
또한, Jacobson 등이 개발한 Utah/MIT hand는 4개의 손가락을 지니며 각 손가락은 공압 실린더에 의해 구동되는 tendon을 통해 독립적으로 동작하는 4개의 관절로 이루어져 있고, Anthrobot-2 hand는 5개의 손가락을 갖는 로봇 손으로서 각 손가락은 tendon을 이용하여 서보모터에 의해 구동되는 4개의 관절로 이루어져 있다.
이후, Lin과 Huang은 사람의 손과 같이 5개의 손가락으로 구성되며 각 관절이 소형모터와 기어세트로 구동되는 총 17 자유도의 NTU hand를 개발하였고, Rossheim사에서는 인체의 근육을 서보모터를 이용한 선형 액츄에이터로 사용하는 등 많은 부분에서 인간의 손을 흉내 낸 세 손가락 로봇인 Omni Hand II를 개발하였다.
그러나 이와 같은 기존 기술의 로봇 핸드는 대부분 구동기를 포함한 로봇 손의 전체 시스템이 복잡하고 비대하여 사람 크기의 로봇 핸드 개발에 많은 어려움이 있었다. 따라서 소형모터와 같은 구조가 간단하고 제어가 쉬운 동력원을 이용해 사람의 손 크기와 흡사한 크기의 손가락 관절운동이 가능하도록 하는 다지 로봇 핸드의 개발이 요구되는 바이다.
■ 발명이 이루고자 하는 기술적 과제
상기한 바와 같은 문제점을 해결하기 위한 본 발명의 목적은 링크 연결형 종속 메커니즘을 이용해 다지 로봇 핸드의 손가락 관절운동이 모사되도록 함으로써, 구조가 간단하면서도 적은 비용으로 사람의 손 운동을 모사할 수 있도록 한 다지 로봇 핸드를 제공함에 있다.
■ 발명의 효과
본 발명은 링크 연결형 종속 메커니즘을 이용해 다지 로봇 핸드의 손가락 관절운동이 모사되도록 함으로써, 구조가 간단하면서도 적은 비용으로 사람의 손 운동을 모사한 다지 로봇 핸드를 제작할 수 있는 효과를 갖는다.
또한, 본 발명은 소수의 동력원만을 이용해 손가락 관절운동을 구동하는 구조여서, 제어가 간편하고, 특히 소형모터의 회전수를 제어함으로써, 로봇 핸드의 섬세한 구동이 가능해지는 효과가 있다.
B1N180V-QR20 / 사진. 터크 산업 자동화 전문기업 터크(Turck)가 경사 스위치와 IO-Link 마스터, 유량 센서, 유도형 링 센서, IIoT 플랫폼 등 산업 현장의 디지털화와 스마트 자동화를 지원하는 신제품 및 솔루션을 잇달아 공개했다. 이번에 선보인

사진. LS일렉트릭 LS일렉트릭이 차세대 IPC 기반 제어 플랫폼 ‘SU-CM70’을 공개하며 Software Defined Automation 시대를 겨냥한 자동화 플랫폼 전략을 본격화했다. SU-CM70은 초고속·다축 모션 제어와
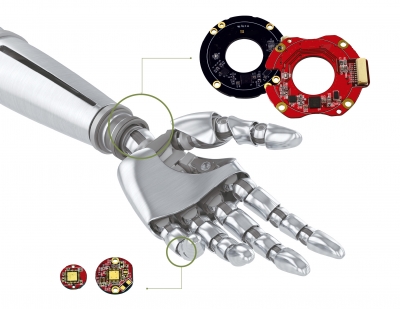
사진. 엔알티센서스 기존 엔코더 구조의 한계 개선 로봇 산업의 고도화와 함께 관절 단위의 정밀 제어 기술이 핵심 경쟁력으로 부상하며, 고해상도 엔코더에 대한 수요가 빠르게 증가하고 있다. 특히 휴머노이드 로봇에 대한 관심도 증가와 협동로봇의 확산으로 제한된 공간 내에서
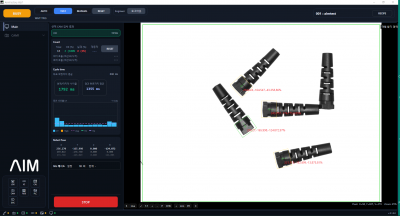
사진. 에이아이엠 자동화 솔루션 기업 에이아이엠(이하 AIM)이 로봇과 비전을 하나의 플랫폼으로 통합한 신규 소프트웨어 ‘AIMFactoryCore’를 앞세워 제조 자동화 시장 공략에 나선다. 기존 비전 중심 시스템에서 한 단계 확장된 구조를 통해


하비스탕스(주) 임승재 대표이사 / 사진. 하비스탕스(주) 하비스탕스(주)는 적층제조 기술을 기반으로 맞춤형 로봇 그리퍼 서비스 그립팜(GriPalm)을 제안하며 로봇 자동화 시장에서 경쟁력을 확대하고 있다. 동사는 씨메스로보틱스(주) 적용 사례를 통해 경량 EOAT(
생성형 AI와 휴머노이드가 산업계의 화두로 떠오르면서 제조 현장에서도 AI 활용 방안에 대한 관심이 높아지고 있다. 그러나 실제 공장에서는 화려한 기술보다 안정성과 생산성이 우선된다. (주)티로보틱스는 반도체 공정용 로봇으로 축적한 기술력을 기반으로 모바일 로봇과 피지






