

임팩트 있는 로봇을 모토로 SCHUNK가 개최한 ‘제7회 SCHUNK Expert Days Service Robotics’에서 시드니 하버브릿지를 사례로 들어 철골 구조물을 청소하고 관리하는 로봇 어플리케이션이 소개됐다.
최초의 철골구조물 다리 청소의 자동화는 7년 전 시드니의 사례이다. 디카이리우(Dikai Liu) 교수의 지휘 아래, NSW Roads와 Maritime 서비스, 시드니 기술 대학교(UTS, University of Technology Sydney)의 오토노무스 시스템 센터가 협업해 철골구조 다리를 위한 자동화 샌드블라스팅 로봇(모래 분사 로봇)을 개발했다.
오늘날 SABRE 오토노무스 솔루션, 시드니 기술 대학교(UTS) 로보틱스 스타트 업은 마케팅뿐만 아니라 상업적 시행에도 관여하고 있다. 호주 샌드블라스팅 장비의 선두주자 Burwell 테크놀로지는 투자에 참여하고 있으며, 차세대 시스템 판매를 시작한 상황이다.
시드니 하버브릿지에 적용된 로지와 샌디
테스트를 성공적으로 마친 샌드블라스팅 로봇은 세계적으로 유명한 시드니 하버브릿지 유지관리팀 기본 장비의 일부가 됐다.
너비 503m, 아치크라운의 높이 134m, 52,800t의 철골무게를 자랑하는 이 다리는 세계에서 가장 높고 긴 다리이며, 이 다리 역시 여느 철골구조의 다리처럼 계속해서 부식되지 않도록 관리되어야 한다. 이것은 485,000㎡의 철골 혹은 약 68개의 축구장 규모에 모래를 분사하고 페인트 칠을 하는 것과 같다. 1회 코팅을 위해서는 약 30,000ℓ의 페인트가 필요하다.
‘로지’와 ‘샌디’라는 이름의 두 분사 로봇은 먼지와 녹슨 부스러기, 오래되어 벗겨지기 시작한 페인트 따위를 끊임없이 힘차게 불어내며 청소한다.
극도에 다다르는 육체적인 피로와 높은 곳에서의 긴장감 때문에 작업자들이 매시간 15~30분의 휴식시간이 필요하지만, 이 두 로봇은 별다른 제약 없이 각자의 길을 앞으로 1m씩 나아간다. 이 로봇들은 사람보다 더욱 지속적이면서도 빠르고 정확하다. 로봇이 담당한 구역의 청소에는 약 50분가량이 소요된다.
이 경량의 암 로봇은 단순 레일 시스템위에서 수동적으로 자리를 잡고, 자동으로 3면 디멘셔널맵을 작동시켜 철골 구조물을 스캔한다. 작업은 리모컨을 통해 원격으로 제어한다. 매핑시스템은 Kinect 센서와 특별한 알고리즘을 이용해 부식을 방지하면서 모래 분사의 정확한 거리를 계산하며, 작동기는 안전거리를 두고 분사 과정을 지켜본다.
이 두 로봇의 작동으로 SABRE 오토노무스 솔루션의 엔지니어링 디자인 매니저 그렉피터스는 현저하게 눈에 보이는 안전성과 비용절감, 뛰어난 샌드블라스팅 작업의 성과를 확인했다.
그는 “심지어 숙련된 일꾼들마저도 모래 분사 작업 중에는 피로감 때문에 지속적으로 좋은 결과를 내기가 힘들다”며 “더불어 작동 시스템이 지금 보다 더욱 간단해 지긴 어렵다”고 만족감을 표시했다.
샌드블라스팅 로봇의 핵심은 SCHUNK Technology

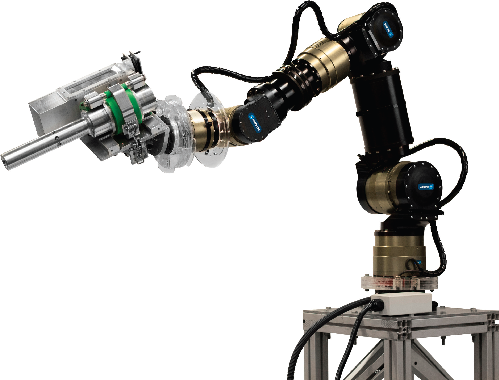
샌드블라스팅 로봇의 핵심은 대형 중량 물건을 로딩하는데 뛰어난 클램핑 테크놀로지와 SCHUNK의 LWA 4 경량 암이다.
보호 커버를 입힌 경량 암은 진동과 분사 동작의 전환에서 오는 압박과 오래된 녹, 먼지, 습기 등으로부터 큰 영향을 받지 않는다. 로봇은 위치 변경을 위해 현장에서 트랙을 따라 다른 곳으로 이동할 수 있고, 콤팩트한 모듈로 분해되어 작업자가 직접 옮길 수도 있다.
이동성과 강력함, 힘과 경량이라는 독특한 조합을 통해 다기능 헬퍼(Helper)로 인정받고 있는 LWA는 일반적인 산업용 로봇과 다르게, 인간과 마주하는 즉각적인 환경에서 다양한 업무를 자동화시키는 것에 초점을 맞춰 개발됐다.
이는 시드니의 샌드블라스팅 어플리케이션과 같은 보조 시스템 사용뿐만 아니라 관찰/감독과 조립 업무까지 가능하다. +/-0.1㎜의 높은 반복정밀도를 지속적으로 실현함으로써 정밀 작동에 최적환경을 제공하고, 휴대가 가능하며, 이동식으로 이용될 수 있다. 더불어 15㎏의 페이로드를 보유하고 있다.
모듈러 디자인은 다양한 자유도와 드라이브파워, 종류 및 자유롭게 움직이는 관절이 가능하다. 부스터와 드라이브 컨트롤 시스템이 경량 암에 직접적으로 박혀있기 때문에 별도의 컨트롤캐비닛은 필요 없다. 대신 전체 컨트롤과 전기 조절기가 관절 드라이브 내에 통합되어 있으며, 위치, 속도, 토크는 유연하게 조절이 가능하다. 똑똑한 유니버셜 커뮤니케이션 인터페이스와 데이터전송, 전원공급케이블 기술은 경량 암이 빠르고 쉽게 현존하는 제어 콘셉트 내로 들어갈 수 있도록 하며 이는 내재된 PC에 의해 제어된다.
더불어 기본적인 CAN 인터페이스를 이용해 개별 모듈이 모든 LWA에 속도 선택, 파워 컨트롤을 손쉽게 조절할 수 있도록 한다.
이 로봇은 특히 경량의 무게로 긴 러닝타임이 가능한 이동식 어플리케이션으로, 단단한 디자인과 에너지 효율적인 면모로 더욱 인정받고 있다.
SCHUNK LWA, 차세대 샌드블라스팅 로봇에도 적용
샌드블라스팅 작업은 숙지해야 하는 안전예방책뿐 아니라, 최대 3명의 작업자로 이루어진 팀이 필요하며, 시드니 하버브릿지 역시 마찬가지다. 하나의 작동 제어기와 최대 2개의 로봇을 볼 수 있는 모니터가 요구된다. 작업에 있어서는 반복적으로 행해지는 위험하고, 육체적으로 고된, 심지어는 인체 해로운 일들이 거의 대부분 로봇에 의해 이뤄지고, 로봇이 어느 한 부분을 끝내면, 작업자는 블라스팅 건(GUN)을 가지고 복잡하고 까다로운 부분을 살펴본다. 이 로봇 시스템의 회수 기간은 약 2년이고, 현재 SABRE는 SCHUNK LWA를 이용해 최대 65㎏의 무게로 쉽게 이동가능하며, 대교나 또 다른 어플리케이션에 적용할 수 있는 이동식샌드블라스팅 로봇을 개발 중이다.








