
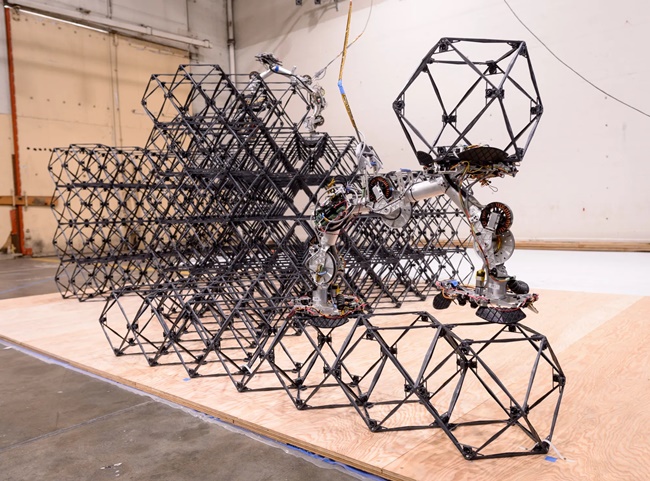
NASA 산하 ARMDAS이 자율 로봇을 통한 실증 테스트를 진행하고 있다 / 사진. NASA
NASA 산하 ARMDAS 팀이 로봇과 스마트 알고리즘을 활용해 구조물 건설 실증 테스트를 진행했다. 해당 실증에서 로봇은 고강도 복합소재로 이뤄진 블록을 활용해 자율적으로 구조물 건설에 성공했다. 해당 로봇은 우주 탐사에 필요한 시설 구축은 물론 용도 변경에 따른 재구축 역시 가능하다. 본지는 NASA가 현재 개발 추진 중인 해당 기술을 소개한다.
심우주 탐사 위한 필수 과제
최근 세계 각국이 앞다투어 우주산업 육성을 국정과제로 추진하고 있다. 이를 위해 각국 정부는 우주항공 전담기관을 설립해 달과 화성 진출, 심우주 탐사, 우주 채굴 등 다양한 분야의 우주산업 육성을 위해 노력하고 있다. 대한민국 정부 역시 지난 1월 우주항공청 설립을 본격 추진한다고 공표했다.
인간의 생존 여건이 갖춰지지 않은 우주 탐사를 위해서는 대규모 인프라 구축이 이뤄져야 한다. 요컨대, 승무원 거주공간부터 지구와 통신을 위한 통신시설, 태양광 발전소 등의 건설이 선행돼야만 장기적인 심우주 탐사가 가능하다.

국제우주정거장 전경 / 사진. NASA
하지만 아무것도 존재하지 않는 우주 공간에서 인프라를 건설하는 것은 불가능에 가깝기에, 인류는 지금껏 필요한 장비(또는 시설)를 지구에서 제작해 로켓을 통해 우주로 쏘아 보내는 방법을 고수해 왔다. 인류가 만든 가장 큰 우주 건축물인 국제우주정거장(International Space Station, 이하 ISS) 역시 지구에서 제작한 모듈을 수 차례에 걸쳐 발사해 완성했다.
하지만 이와 같은 방식은 거대한 구조물을 한 번에 우주로 쏘아 올릴 수 없다는 단점이 존재한다. 결국 지속 가능한 심우주 임무 수행을 위해서는 조립된 모듈을 지구에서 쏘아 보내는 대신 우주 현장에서 인프라를 건설하고 유지할 수 있는 기술이 필요하다.
세계 우주산업을 선도하고 있는 미국 항공우주국(National Aeronautics and Space Administration, 이하 NASA)은 최근 로봇과 스마트 알고리즘을 활용해 고성능 구조물 건축에 성공했다. NASA는 해당 기술에 대한 실증을 진행했고 이에 대한 연구결과를 지난 1월 17일(현지시각) ‘Science Robotics’에 발표했다.
로봇 확장성 및 신뢰성 검증
NASA 산하 ‘ARMADAS 팀(Automated Reconfigurable Mission Adaptive Digital Assembly Systems team)’은 심우주에서 직접 인프라 구축이 가능한 하드웨어 및 소프트웨어 시스템 개발을 진행해 왔다. 해당 시스템은 자벌레 형태의 로봇을 활용해 구조물을 건축한다.
ARMADAS 팀은 해당 로봇이 우주공간에서 탐사를 위한 구조물을 건설, 수리, 재구성할 수 있을 것으로 기대하고 있다. NASA는 해당 로봇이 인간이 도착하기 전에 궤도, 달 표면, 타 행성 등의 공간에서 능동적인 작업이 가능하다고 설명했다.
최근 ARMADAS 팀은 캘리포니아 실리콘 밸리 소재 NASA Ames 연구 센터에서 해당 기술에 대한 실증 테스트를 진행한 뒤 시스템 성능을 분석했다. 테스트 진행 동안 세 대의 로봇이 약 100시간에 걸쳐 협력해 자율작업을 진행한 결과 수백 개의 블록을 사용해 미터 규모의 대피소 구조물을 건축했다.
NASA Ames 연구소 ARMADAS 팀 크리스틴 그레그(Christine Gregg) 수석 엔지니어는 실증 테스트에 대해 “이번 실험은 시스템의 중요한 부분인 로봇의 확장성 및 신뢰성은 물론 로봇이 건설한 구조물의 성능을 보여줬다”라며, “해당 테스트는 우주 응용 분야 기술 발전의 핵심이다”라고 소감을 밝혔다.
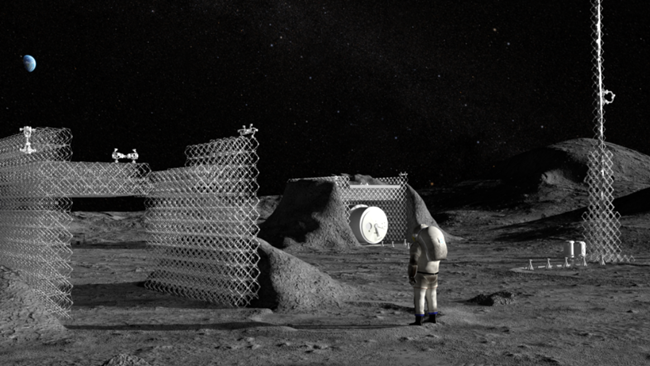
해당 로봇을 통해 구축한 우주 인프라 상상도 / 사진. NASA
고강도 소재 블록 조립 및 재구성 가능
이번 테스트에 사용된 블록은 높은 강도와 강성, 낮은 질량의 성질을 가졌다. 이러한 특징은 긴 교량, 항공기 날개, ISS의 트러스(Trusses) 같은 구조물과 유사하다.
실증 테스트의 성과는 실증에 사용된 블록으로 필요한 형태에 알맞은 구조물 형성에 성공했으며, 요구 사항에 따라 자체 재구성이 가능하다는 사실이다.
이는 마치 스마트 디스플레이기기의 이미지(또는 텍스트)와 유사하다. 디지털 이미지는 작은 픽셀(PIXEL)의 합으로, 프로그래밍 된 이미지를 2차원 공간에서 자유롭게 형성한다. 출력되는 이미지가 바뀌면 픽셀 역시 재구성된다.
실증 테스트에 사용된 블록 역시 3차원 공간에서 시스템이 프로그래밍한 건축물 구조 형성이 가능하다. 또한 요구되는 프로그래밍이 변할 경우, 로봇은 변화하는 요구 사항을 충족하기 위해 구조물을 재구성한다.
이렇듯 2차원 공간에서 픽셀과의 유사한 특징으로 인해 ARMADAS 팀은 해당 블록을 복셀(Voxels)이라고 언급했다.
NASA Ames 연구소 ARMADAS 팀 케니 청(Kenny Cheung)은 “해당 기술은 다양한 목적으로 구조물을 재사용할 수 있어 새로운 임무 진행에 대한 비용 절감이 가능하다”라며, “이 시스템은 오늘날 우리가 사용하는 디지털 디바이스 시스템을 아날로그로 구현해 놓은 것과 같다”라고 언급했다.
케니 청은 이어서 “복셀의 외관을 고려했을 때 해당 시스템이 얼마나 견고한 기술인지 놀라울 따름이다”라고 소감을 밝히며, “작은 복셀을 통해 효율적으로 거대한 구조물을 만들 수 있으며 만들 수 있는 구조물은 공급되는 블록 개수에 의해서만 제한된다”라고 말했다.
NASA 관계자는 “이번 실증을 진행한 기술의 확장성은 기존의 우주선을 제작하는 방법이나 3D프린팅 기술과 비교해도 가히 혁명적이다”라고 설명했다.
자율로봇 통한 구조물 건설
실증 테스트에서 ARMADAS 팀은 건축되는 구조물에 대한 로드맵을 제공했지만, 로봇의 세부적인 작업에는 관여하지 않았다. 로봇의 작업은 전적으로 소프트웨어 알고리즘에 의해 진행됐으며, 해당 시스템은 실제 실증 테스트 이전 시뮬레이션을 자율적으로 진행해 구조물 건설 시퀸스를 연습했다.
구조물 건설은 자벌레 형태 로봇 두 대가 구조물 외부를 이동하며 한 번에 축구공 크기 복셀 하나를 운송해 배치하는 방식으로 설계됐다. 첫 번째 로봇이 격자 형태로 이동하며 복셀을 가져와 두 번째 로봇에 전달하면, 두 번째 로봇은 복셀을 알맞은 위치에 배치한다. 이후 세 번째 로봇이 배치된 복셀의 내부 공간을 기어오르며 각각의 복셀을 볼트로 고정시키는 방식이다.
크리스틴 그레그 수석 엔지니어는 “지구에 있는 일반적인 건설 현장과 같이 구조화되지 않은 환경에서 작동할 수 있는 자율 로봇 개발은 매우 어려운 기술”이라며, “NASA는 격자 구조로 작동하는 매우 간단하면서도 신뢰성이 높은 로봇을 제작해 이 문제를 해결했다”라고 설명했다.
구조물 라이브러리 확장 기대
ARMADAS 팀은 이번 실증에 이어 프로젝트를 진행해 항후 작업에서는 태양광 패널, 전기 연결 및 차폐 등을 포함해 로봇이 작업하는 복셀 라이브러리를 확장할 것이라고 밝혔다.
새로운 모듈 유형은 로봇은 특정 요구 사항 및 위치에 맞게 혼합되고 일치되기 때문에 응용 범위는 광범위하게 확장된다.
또한, ARMADAS 팀은 우주비행사 도착하기 이전에 미리 건설된 구조물 안전을 확인하는 새로운 로봇 기능을 개발하고 있다고 전했다.
NASA 관계자는 “ARMADAS 팀의 방식은 심우주 탐사 임무를 위한 작업의 지속 가능성을 획기적으로 향상시키고 있다”라며, “진행 중인 임무가 완료되면 로봇은 기존 우주 구조물을 분해해 미래 지향적인 설계를 구성할 수 있다”라고 말했다.







