
현대 사회에서 로봇이라는 용어는 다양한 함의를 지니며, 그 형태와 작동 방식, 적용 환경 등과 같은 요인으로 구분된다. 적용 분야에 따라 크게 제조용, 서비스 및 전문 서비스용으로 구분하며, 형태상으로는 다관절 구조나 병렬링크 구조, 직교 구조, 이동형 구조 등이 대표적이다.
한편 신규 로봇을 개발에 있어, 특정한 목적이나 미션을 달성하기 위해 구조 설계에서부터 새롭게 접근하는 경우가 있다. 이 경우에는 기존의 정형화된 특정한 로봇의 구조를 추종하지 않고 목적에 맞는 형태로 시스템을 구성하는데, 예를 들어 견마로봇이나 의료/재활로봇, 재난로봇과 같은 특수목적용 로봇이 여기에 포함된다.
특수목적용 로봇은 로봇 설계와 제어, 영상 및 음성 처리, 인공지능과 같은 다양한 로봇 기술을 특정한 목적에 부합하도록 최적화시킨 로봇을 의미한다. 건설 작업, 수중 작업, 농업, 지뢰 제거나 감시 경계와 같은 군사 작전, 의료 및 복지 등 로봇기술이 필요한 광범위한 분야에서 사용이 가능하지만, 적용 분야의 특성상 양산이 어려운 분야이기도 하다.
특수목적용 로봇 설계의 핵심 ‘DC서보드라이브’
특수목적용 로봇은 로봇이 목표로 하는 기능을 원활하게 수행할 수 있도록 최적화된 기구부 설계와 다양한 기능이 요구되는 만큼 개발 의도에 부합하는 서보드라이브를 선정하는 것이 무엇보다 중요하다.
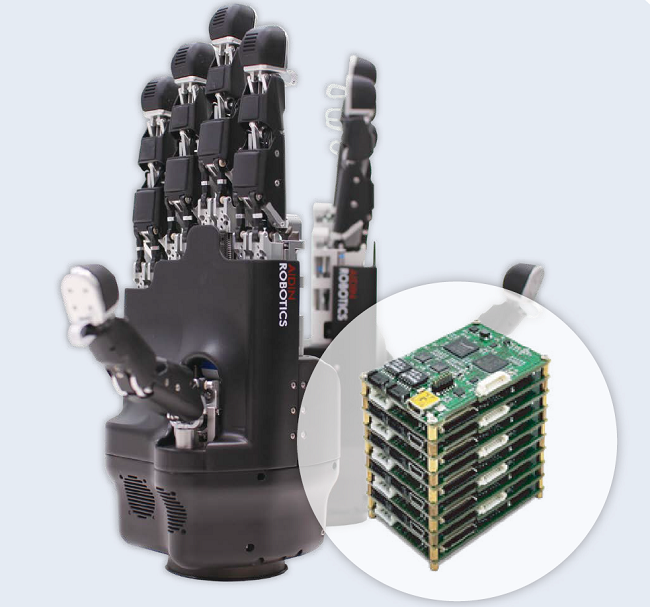
웰콘시스템즈의 DC서보드라이브가 적용된 인간형 로봇핸드(제조사. 에이딘로보틱스)
특히 견마로봇이나 웨어러블 로봇, 감시정찰로봇, 지뢰탐지로봇 등 많은 종류의 특수목적용 로봇들이 배터리를 기반으로 구동하므로, 제한적인 공간에 콤팩트하게 설치할 수 있으면서도 여러 기능을 담을 수 있는 DC서보드라이브의 선정이 곧 특수목적용 로봇 설계의 핵심이라고 볼 수 있다. 성공적인 특수목적용 로봇 개발은 개발자가 의도한 설계에 부합하는 용량과 사이즈, 기능의 DC서보드라이브를 선정하는 것에서부터 시작하기 때문이다.
특수목적용 로봇 개발자들이 국산 DC서보드라이브를 선택하는 이유
특수목적용 로봇에 적용하는 DC서보드라이브의 핵심적인 요소 두 가지는 공간, 그리고 기능이다. 이를 충족하기 위해 예전부터 국내 특수목적용 로봇 개발 기업들은 자체적으로 DC서보드라이브를 새로 개발하거나, 고가의 외산 서보드라이브를 사용해왔다.
로봇 개발 업체가 직접 서보드라이브 개발까지 수행할 경우 전문적인 서보드라이브 개발 인력을 확보해야 하고, 또 상당한 기간의 개발 일정이 소요되므로 이는 업체에 큰 부담이 된다. 또한 지속적인 펌웨어 업그레이드를 위해 연구 인력을 계속 유지해야 한다. 그러나 양산이 어려운 특수목적용 로봇 분야에서 이와 같은 부담을 지속적으로 짊어지는 것은 쉬운 일이 아니다. 이에 그간 많은 기업들이 고가의 외산 모션 컨트롤 업체의 서보드라이브를 채용했다. 하지만 이 경우에는 부품 원가의 상승과 납기, 무엇보다 원하는 기능과 사이즈의 커스터마이징 서비스를 받기 어렵다는 문제가 있다. 이는 기성 서보드라이브에 맞춰 로봇을 설계해야 하는 주객전도의 상황을 야기할 수도 있다.
웰콘시스템즈는 이 같은 DC서보드라이브 공급 구조의 문제를 해결하기 위해 로봇 개발자가 설계한 로봇 구조에 맞는 형태와 규격, 기능을 포함한 DC서보드라이브를 맞춤형으로 공급하고 있다. 당사는 DC서보드라이브 국산화에 성공하고 나서 다양한 특수목적용 로봇 제조사에 맞춤형 DC서보드라이브를 공급했다.

다양한 특수목적용 로봇에 적용된 웰콘시스템즈의 맞춤형 DC서보드라이브 / 자료. 웰콘시스템즈
4족 보행 견마로봇
최근 국내 로봇 업계에서 큰 이목을 모으고 있는 에이딘로보틱스의 4족 보행 견마로봇은 웰콘시스템즈의 DC서보드라이브가 적용된 대표적인 특수목적용 로봇이다. 본 사례의 견마로봇은 다리 하나당 DC서보드라이브 3개씩, 총 12개를 탑재해야 했는데, 이는 가장 공간이 넓은 보디에 탑재하더라도 배터리와 제어부로 인해 공간적 어려움이 있다. 이에 웰콘시스템즈는 DC서보드라이브를 극도로 콤팩트하게 설계함으로써 로봇 다리 하나당 3개씩, 총 12개의 DC서보드라이브를 4족의 관절에 탑재할 수 있게 했다.

웰콘시스템즈의 커스터마이징 DC서보드라이브가 적용된 4족 보행 견마로봇(제조사. 에이딘로보틱스)
/ 사진. 로봇기술
기능적인 측면에서도 주목할 부분이 있다. 4족으로 보행하는 견마로봇은 이동 시 지속적으로 관절에 충격이 가해지기 때문에 단순히 콤팩트하게 제작하는 데 그치지 않고 사이즈 대비 더 높은 출력의 모터 토크에 대응하면서도 방열을 고려해 개발했다. 최대 정격 58A 기준 DC서보드라이브의 제원이 무게 130g, 크기 92×37×31㎜로, 동급 용량에 대응하는 표준 모델 대비 사이즈를 크게 줄였다.
로봇핸드
아주 정밀하거나 민감한 제품을 파지하려면 일반적인 공압그리퍼와 달리 특수한 그리퍼가 필요하다. 일반적으로 이 같은 특수 그리퍼는 그리퍼 핑거 끝에 센서를 부착해 힘을 감지하면서 토크를 제어하는 등의 기능이 요구되므로 일반적인 DC서보드라이브를 쓰기 어렵다.
에이딘로보틱스의 인간형 로봇핸드는 일반적인 특수 그리퍼와 달리 더욱 고도화된 기술력이 집약된 파지 시스템으로, 로봇에 새로운 역할을 부여할 수 있다는 점에서 굉장히 중요한 솔루션이다. 프리시전 모드(Precision Mode)와 파워 모드(Power Mode)의 두 가지의 모드를 지원하는데, 전자는 위치 제어 성능이 중요한 작업에서, 후자는 힘 제어가 필요한 작업에 적합하다. 실제 사람 손과 같이 고도의 작업을 수행하는 인간형 로봇핸드에는 해당 기능을 지원할 수 있으면서도 손 모양의 작은 기구부에 탑재 가능한 DC서보드라이브가 요구된다.

인간형 로봇핸드 제원(제조사. 에이딘로보틱스)
본 사례의 인간형 로봇핸드는 총 15개의 축으로 구성되며, 218×102×97㎜의 크기에 중량은 1.1㎏이다. 특징적인 부분은 웰콘시스템즈는 60×40×78㎜ 사이즈에 136g의 경량화된 DC서보드라이브로 이 15개에 달하는 축을 제어하고, 또한 그 외에 통신을 통해 손가락 끝에 설치된 힘 센서의 신호를 주제어기로 전송함으로써 배선을 절감하는 역할도 수행한다.
한편 로봇핸드 외에도 최근 산업 현장에서 중요성이 높아지고 있는 힘 제어가 가능한 특수 그리퍼에도 당사의 DC서보드라이브가 적용되고 있다.
수술로봇 암
최근 양산 개발에 돌입한 수술로봇 암 DC서보드라이브는 아주 협소한 공간에 여러 기능을 구현했다는 점에서 특히 주목할 만한 사례이다.
마스터-슬레이브 구조로 이루어진 수술로봇은 집도의가 조작 디바이스에서 손기술을 활용하면 원격의 매니퓰레이터가 대신 작업을 시행하는 방식을 취한다. 일반적인 마스터-슬레이브 구조의 원격 조작 로봇과 달리 수술로봇은 조작 시 발생하는 손 떨림 등을 방지해 더욱 정밀하게 작동해야 하고, 또한 집도의가 손 끝 감각을 느낄 수 있도록 촉각을 피드백해야 하는데, 이 모든 기능을 DC서보드라이브에서 제어해야 한다. 또한 툴이 탑재되는 수술로봇 암이 다자유도로 구성되는데, 이를 위해 일일이 케이블을 연결할 수 없기 때문에 협소한 공간에 자유도만큼의 DC서보드라이브를 탑재할 수 있는 기술이 필요하다. 웰콘시스템즈의 경우 5자유도의 수술로봇 암 제어를 위해 6㎜의 아주 낮은 높이에 6축의 DC서보드라이브를 탑재했으며, 현재는 상위 제어기의 부담을 최소화하는 상용화 제품을 개발 중이다.
핵심은 결국 공간과 기능
전술한 바와 같이 특수목적용 로봇의 DC서보드라이브는 로봇 개발자가 원하는 기능을 제한된 공간에서 실현해야 한다. 이를 위해서는 해당 로봇의 설계와 콘셉트에 맞는 맞춤형 DC서보드라이브 제공이 가능한 기업을 선택하는 것이 중요하다. 웰콘시스템즈는 특수목적용 로봇과 관련해 4족 보행 견마로봇, 로봇핸드, 각종 특수 그리퍼, 수술로봇, 생체모방로봇, 방위산업 등 다방면의 공급 레퍼런스를 보유하고 있다.
DC서보드라이브 국산화가 실현된 현시점에서, 그간 특수목적용 로봇 개발에 있어 DC서보드라이브로 고민했던 많은 기업들의 국산 DC서보드라이브 기업과의 협력으로 애로를 해소할 수 있기를 기대한다.
필자

(주)웰콘시스템즈 박상덕 대표이사







