
파나소닉 커넥트와 주오대학 이공학부 우메다 가즈오 교수가 이끄는 연구팀이 ‘Vision- Based In-Hand Manipulation of Variously Shaped Objects via Contact Point Prediction’의 타이틀로, 인핸드 매니퓰레이션 기술에 대한 공동 연구의 성과를 발표했다. 또한 접촉점의 예측에 근거한 영상을 이용한 In-Hand Manipulation을 발표했다. 본지에서는 파나소닉 커넥트와 주오대학의 인핸드 매니퓰레이션 기술을 소개한다.
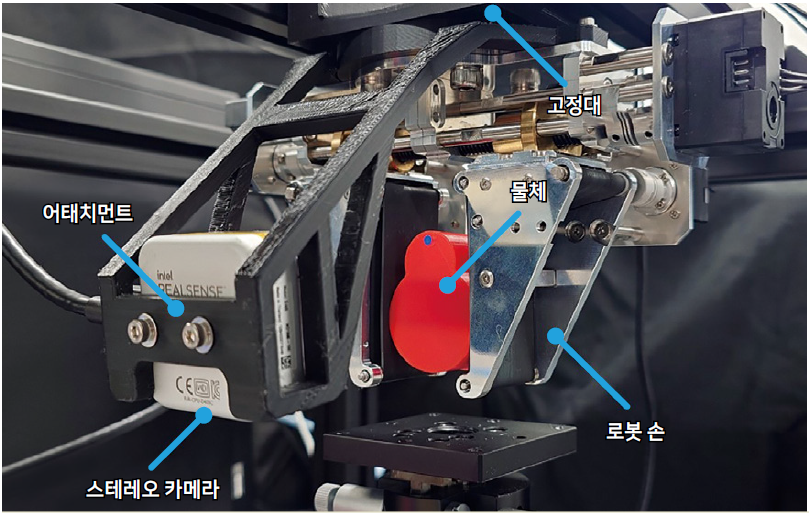 사진. 파나소닉 커넥트
사진. 파나소닉 커넥트
로봇 손을 사용한 손 조작의 과제
최근에는 자동화가 가속화됨에 따라 적용되는 로봇에 요구되는 움직임도 정교해지고 있다. 로봇 손의 조작도 예외가 아니다.
손 조작은 로봇 손으로 잡은 물체의 위치와 자세를 바꾸는 동작을 의미한다. 최근 손 조작을 원활하게 작동하기 위해 표면의 컨베이어 벨트를 감싼 여러 손가락으로 구성된 많은 로봇 손이 연구되고 있다. 손가락으로 물체를 잡고 벨트를 움직이면 물체를 이동시켜 회전시킬 수 있어 물체의 위치와 방향을 변경할 수 있는 범위를 확장할 수 있다.
그러나 집하될 제품을 집기 위해 자세를 변경해야 하는데 손의 물체를 회전시킬 때 물체의 모양과 자세에 따라 계속 잡고 손에서 떨어질 수 없다는 문제가 있었다.
이에 파나소닉 커넥트와 주오대학 이공학부 우메다 가즈오 교수가 이끄는 연구팀이 ‘Vision-Based In-Hand Manipulation of Variously Shaped Objects via Contact Point Prediction’의 타이틀로, 인핸드 매니퓰레이션 기술에 대한 공동 연구의 성과를 발표했다. 또한 접촉점의 예측에 근거한 영상을 이용한 In-Hand Manipulation을 공개했다.
인핸드 매니퓰레이션 기술에 대해 파나소닉 커넥트에서는 로봇 비전 기술을 활용해 대상물의 형상이나 자세에 따라 손가락과 벨트를 제어하는 시스템을 개발했다. 대상물을 떨어뜨리지 않고 파지하기 위해서는 대상물의 표면과 로봇 핸드가 계속 접촉해야 한다.
접촉을 유지하기 위해서는 대상물의 형상이나 회전 중 자세에 맞춰 손가락끼리의 폭을 조절할 필요가 있다. 그러나 손가락이 필요한 폭만큼 개폐하지 않는 상황도 있어 그 경우에 대상물을 계속 잡을 수 없게 된다. 이 상황을 일으키는 두 가지 방식으로 접근하는 방법을 개발했다.
우선, 대상물의 형상이나 자세에 따라서는 회전 중에 대상물과 핸드가 접촉하고 있는 부위가 변화하는 경우가 있는 것을 접촉점 전환이라고 한다. 접촉점이 바뀌기 전후에 필요한 손가락 폭은 급격하게 변경할 수 있다.
이어 갑작스러운 폭 변화가 일어나면 손가락의 제어가 따라잡지 않고 대상물을 낙하시켜 버리는 일이 있다. 한편, 대상물의 회전 속도가 느린 경우에는 접촉점이 전환되기 전, 후라도 변화가 미미하다. 따라서 카메라 이미왼쪽과 오른쪽에 위치한 점을 감지한다. 이점을 다음 상황의 접촉점 추정 위치로 하고, 이 점에 맞춰 손가락을 제어한다. 이 제어는 현재 관측치가 아닌 다음 상황 추정치에 맞게 손가락이 움직이기 때문에 지연의 영향을 줄일 수 있다.
본 기술을 이용해 22점의 대상물(형상 11종·사이즈 2종)에 대해 실시한 실험에 있어서는 10점을 1회전시키는 데 성공했다. 또, 제안방법을 사용하지 않는 조건에 대해서, 큰 대상물을 낙하시키는 비율이 14.5% 개선하고, 작은 대상물을 1회전시키는 비율이 6.4% 향상했다.
본 기술에 의해 인핸드 매니퓰레이션을 실행할 수 있는 대상물의 종류 및 위치나 자세의 변경 범위의 확대로 이어질 것으로 전망된다.
사진. 파나소닉 커넥트
인핸드 매니퓰레이션 기술의 응용처
이 기술은 파나소닉 커넥트가 목표로 하는 제조·물류·유통 등 공급망의 현장에 기여할 것으로 예상된다. 그 중에서도 이러한 현장에서 다루어지는 물건의 픽앤플레이스 작업에의 활용이 상정된다. 놓인 물건을 로봇 핸드로 픽하고, 인핸드 매니퓰레이션을 실시하는 것으로, 자세를 바꾼 상태로 플레이스하는 것이 가능하다.
물건의 자세를 바꾸는 동작이 필요한 현장은 제조에 있어서 부품 조립 작업이 해당된다. 부품을 선택하고 조립 가능한 자세로 변경한 후, 상대측의 부품에 플레이스하는 작업을 실현할 수 있다.
더불어 물류 현장에 있어서는 창고에서의 상자 포장이나 팩 포장에 응용이 가능하며 다양한 형상의 물건을 정렬시켜 상자 안에 배치함으로써 고밀도 상자 포장을 실현할 수있다. 또한 형상에 개체차이가 있는 청과 등에 대해서도, 카메라 화상으로부터 개체마다의 형상을 리얼타임으로 검출해, 각 개체에 맞춘 제어를 실시할 수 있다.
현상은 사람 손으로 팩 포장돼 있는 물건도, 로봇에 의해 정렬 배치할 수 있어 집하장 등에서의 자동화에 공헌할 것으로 기대된다. 또한 소매점포 등의 유통 현장에서도 상품 진열 등의 물건을 정해진 자세로 늘어놓는 작업의 응용이 전망된다.
파나소닉 커넥트와 중앙대학 관계자는 “앞으로도 기술의 성능 향상을 목표로 다른 기술이나 서비스와 연결함으로써 고객의 현장의 어려움에 대응할 수 있도록 연구 개발을 추진해 나갈 것”이라고 전했다.







