
UNSW 엔지니어링 연구팀이 새로운 소프트 패브릭 로봇 그리퍼를 개발해냈다. (사진. UNSW)
뉴 사우스 웨일스 대학교(The University of New South Wales, 이하 UNSW) 연구팀이 새로운 소프트 패브릭 로봇 그리퍼를 개발해냈다. 연구팀들은 코끼리의 몸통과 유사한 이 발명품을 통해 섬세한 물체를 다루는 것이 필수적인 많은 산업에서 이점을 제공할 것이라고 밝혔다.
연구팀은 로봇 그리퍼를 개발하기 앞서, 코끼리의 몸통 동작에서 영감을 얻었다. 이들은 이 기술이 농업, 식품, 과학 및 자원 탐사 산업과 같이 깨지기 쉬운 물체가 취급되는 분야에 광범위하게 적용될 수 있다고 판단, 나아가 인간 구조 작업이나 개인 보조 장치에도 적용 가능할 것으로 보고 있다.
연구 관계자 Thanh Nho Do 박사는 “업계 파트너를 확보한다면 그리퍼가 향후 12~16개월 내에 상용화될 수 있다”라며, “우리의 새로운 소프트 패브릭 그리퍼는 얇고 평평하며 가볍고 밀폐된 빈 공간에서도 다양한 물체를 잡고 회수할 수 있다”라고 전했다.
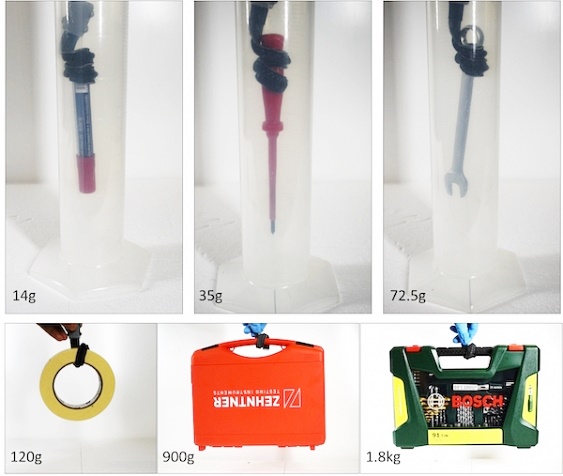
기존 설계보다 15배 더 민감한 이 장치는 취급하는 물체의 손상을 방지하는 데 필요한 그립 강도를 감지하는 실시간 힘 센서를 보유하고 있다. 또한 그리퍼 본체를 유연성에서 뻣뻣한 것으로 또는 그 반대로 변경할 수 있는 열 활성화 메커니즘이 있어 그리퍼의 질량보다 최대 220배 더 무거운 다양한 모양과 무게의 물체를 잡을 수 있다.
Do 박사는 “코끼리, 비단뱀 또는 문어와 같은 동물은 신체의 부드럽고 연속적인 구조를 사용해 물체 주위에 그립을 감는 동시에 접촉과 안정성을 증가시킨다. 물체를 탐색, 파악 및 조작하기가 쉽다는 뜻”이라고 전했다. 이어 “이 동물들은 매우 민감한 기관, 촉각 및 단단한 뼈가없는 수천 개의 근육의 힘을 결합한다. 예를 들어 코끼리의 몸통에는 최대 40,000 개의 근육이 있는데, 우리는 바로 이러한 그립 기능을 모방하고 싶었다. 물체를 잡고 조작하는 것은 많은 로봇의 필수 운동 기술”이라고 전했다.
Do 박사는 연구자들의 새로운 소프트 그리퍼가 적용을 제한하는 단점이 있는 기존 설계를 개선했다고 밝혔다. “많은 소프트 그리퍼는 여러 개의 안쪽으로 구부러진 손가락이 있는 발톱이나 사람의 손과 같은 구조를 기반으로 하지만, 이는 이상한 모양이 있거나 무겁거나 부피가 큰 물체 또는 그리퍼의 개구부보다 작거나 큰 물체를 잡는 데 부적합하다.”라고 언급했다.
“우리의 기술은 길고 가느다란 물체를 잡고 좁고 좁은 공간에서 꺼낼 수 있을 뿐만 아니라 물체의 구멍을 통해 물건을 집을 수 있다”라고 전했다.
수석 저자인 Trung Thien Hoang은 연구원의 제작 방법이 간단하고 확장 가능해 그리퍼를 다양한 크기와 부피로 쉽게 생산할 수 있다고 말했다. 예를 들어 1미터 길이의 그리퍼는 직경이 최소 300mm 인 물체를 처리할 수 있는데, 테스트 중에 무게가 8.2g인 그리퍼 프로토 타입은 1.8kg(그리퍼 질량의 220 배 이상)의 물체를 들어 올릴 수 있는 반면, 13cm 길이의 프로토 타입은 직경 30mm의 물체를 감쌀 수 있었다.
한편 Do 박사는 이 기술을 완전한 장치로 성공적으로 테스트하고 검증한 새로운 그리퍼에 대한 임시 특허를 제출했다. 그는 산업 파트너를 찾으면 향후 12~16 개월 내에 그리퍼가 상용화 될 것으로 예상한다. 그는 “우리는 이제 통합된 재료를 최적화하고, 폐쇄 루프 제어 알고리즘을 개발하고, 그리퍼를 로봇 팔 끝에 통합해 객체를 자율적으로 잡고 조작할수 있도록 할 것”이라고 전했다.







