
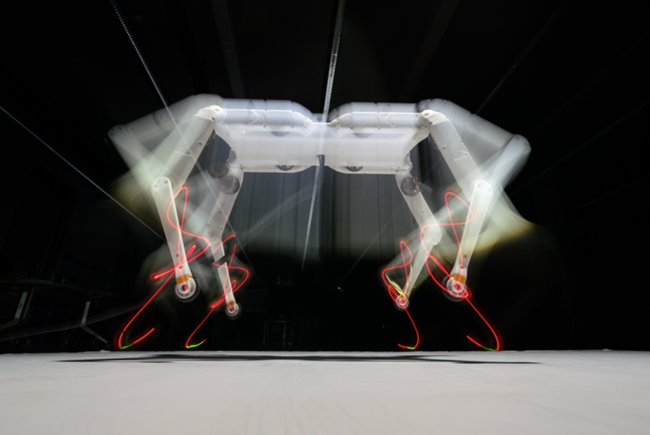
4족 로봇 솔로 8은 연구용 로봇에 최적화된 성능을 자랑한다. (사진. MPI-IS)
4족 로봇 솔로 8(Solo 8)은 독일의 튀빙겐과 슈투트가르트에서 오픈 소스 프로젝트로 개발 된 새로운 연구용 로봇이다. 이 로봇은 토크 제어 4배로 매우 역동적인 움직임이 가능할 뿐만 아니라, 전적으로 3D 인쇄 부품과 상용 구성품으로 만들어져 다리 운동 및 로봇 교육의 기초 연구에 이상적인 플랫폼을 쉽게 복제할 수 있다.
연구팀은 전세계 로봇 연구소에 은행을 해치지 않는 조립하기 쉬운 다리 로봇 키트를 제공하는 것을 목표로 하고 있다. 특히 솔로 8의 소프트웨어는 지속적으로 개선, GitHub에서 공개적으로 제공되고 있다. 막스 플랑크 연구팀(Max Planck Institute for Intelligent Systems)의 과학자들은 다른 팀과 통찰력을 교환하기를 희망한다.
독일 막스 플랑크 연구팀(Max Planck Institute for Intelligent Systems(MPI-IS))은 로봇 공학자들과 협력해 가장 편리하고 사용하기 쉬운 민첩한 4다리 로봇을 개발했다. 세계에서 역동적인 연구 플랫폼으로 알려진 이 프로젝트의 기본 아이디어는 모든 로봇 연구소에 기술을 제공하는 것이다. 전 세계 로봇 기술자는 유사한 플랫폼에서 알고리즘을 교환하고 방법을 비교해 동일한 로봇 하드웨어를 사용하는 다른 팀의 실험에서 통찰력을 얻을 수 있다.
가볍고 토크로 제어 가능한 이 4중 로봇은 허리를 높이 뛰거나 넘어 지거나 발로 돌아오는 등의 역동적인 트릭을 이미 수행할 수 있다. 이 프로젝트의 여러 분야에 걸친 연구팀은 로봇의 동적 기능뿐만 아니라 저렴한 비용과 쉬운 복제를 우선시했다. 연구팀은 연구 및 교육을 위한 접근 가능하고 저렴한 운동 플랫폼을 계획한다. 특히 솔로 8의 시공 파일과 GitHub 문서는 BSD 3절 라이선스에 따라 공개 소스로 공개된다. 또한 오픈 액세스를 통해 프로젝트를 확장, 다른 과학자들이 자체 기술을 프로토타이핑하고 개발할 때 모듈식 셋업을 활용할 수 있다.
네발로봇, 단계적인 행동 시작하다
MPI-IS의 연구그룹 리더이자 뉴욕 대학의 Tandon 공학부 부교수인 Ludovic Righetti는 “우리의 로봇 플랫폼은 고성능 하드웨어를 신속하게 프로토타이핑하고 구축 할 수 있는 훌륭한 기반이다”라고 언급했다. 이어 “예를 들어 프랑스 LAAS-CNRS의 동료들은 WiFi를 통해 로봇과 통신할 수 있도록 전자 보드를 개발했다. 또한 복잡한 제어 및 학습 알고리즘을 플랫폼에서 신속하게 테스트 할 수 있어 아이디어에서 실험 검증까지 걸리는 시간이 줄어들었다”고 밝혔다.
연구팀은 연구를 크게 단순화하고 오픈 소스 접근 방식을 통해 알고리즘을 다른 실험실과 비교, 성능을 더 잘 비교할 수 있도록 했다. 더불어 뉴욕에 있는 실험실에서 가장 진보된 알고리즘은 Solo에서 테스트 단계를 거쳤다.
또한 MPI-IS의 다이나믹 로코모션(Dynamic Locomotion) 연구 그룹의 리더인 Alexander Badri-Spröwitz는 “연구 그룹이 그러한 로봇을 스스로 개발하기 위해서는 4년의 작업이 필요하다”라며, “이제 전세계 모든 로봇 연구소가 온라인으로 접속해 파일을 다운로드하고 부품을 인쇄하며 카탈로그에서 나머지 구성 요소를 구입할 수 있다. 로봇 기술자는 몇 주 안에 추가 기능을 추가할 수 있으며, 세계적인 로봇을 가질 수 있다”고 밝혔다. 이 모든 것은 개인 연구 목표를 달성하기 위해 쉽게 조정할 수 있으며, 비용 역시 저렴하다.
한편 이 프로젝트는 원래 Righetti의 ERC 시작 보조금과 여러 MPI-IS의 풀뿌리 프로젝트 및 미국 국립 과학 재단 보조금에 의해 자금을 지원받았다. 수년간의 기계 공학, 메카트로닉스, 전기 공학 및 컴퓨터 과학에 대한 전문 지식을 결합해 더 많은 과학자들이 합류했다.
지난 2018년 로봇 솔로 8은 튀빙겐과 슈투트가르트의 연구소를 처음 로밍, 2020년 5월에는 “다리 운동 연구를 위한 개방 토크 제어 모듈형 로봇 아키텍처 출판물에 채택되기도 했다. 이 연구는 세계 최고의 로봇 회의 중 하나인 로봇 공학 및 자동화에 관한 국제회의 ‘ICRA’에도 영향을 미쳤다.
MPI-IS의 메카트로닉스 엔지니어인 Felix Grimminger는 “Solo는 미래에 관심을 가질만한 몇 가지 새로운 기능을 가지고 있다”라며, “솔로의 개념은 그의 아이디어, 지속적인 최적화는 인센티브였다. 이것은 광범위한 운동 범위를 가지고 있을 뿐만 아니라, 로봇이 등 뒤에 떨어지면 다리를 다른 방식으로 구성하고 일어설 수도 있다”고 밝혔다. 실제로 이 로봇은 서 있는 높이 24㎝에서 65㎝까지 올라갈 수 있다.
로봇은 스프링과 같은 동작을 수행한다. 즉 다리가 리바운드 구조로 작동하는데, 토크 제어 모터는 동물 다리의 근육 또는 힘줄의 탄성과 같은 기능을 수행한다. 로봇은 가상 스프링을 사용하는데, 가상 스프링으로 프로그래밍할 수 있다.
또 다른 주요 특징은 2kg 이상의 가벼운 디자인이다. 대부분의 네 발 달린 동물은 연구 환경에서 상당히 무겁기 때문에 다루기가 더 어려운 반면, 이 로봇은 무게가 가벼워 학생들이 로봇으로 작업하기가 쉬워졌으며 더욱 안전해졌다. 관계자는 “원한다면 솔로 8을 배낭에 넣어 집이나 회의에 가져갈 수 있을 것”이라고 전했다.
연구원들은 솔로의 핵심 액추에이터 모듈을 최적화하고 테스트하기 위해 많은 노력을 기울여왔다. 로봇은 8개의 작동 조인트에 대한 정의를 수행, 이름에 숫자 8을 표시하게 됐다. 각 로봇 다리는 엉덩이와 무릎의 각도를 변경할 수 있으며, 새로운 로봇 버전이 최근에 완성돼 첫 번째 테스트는 더 많은 자유도를 가지고 수행되고 있다. 이제 ‘솔로 12(Solo 12)’는 추가 자유도로 인해 더욱 다재다능하고 복잡한 행동을 표시할 수 있을 전망이다.







