
비전은 더욱 다양한 로봇 자동화를 실현시켜주며 로봇에게 새로운 가능성을 제시한다. 그러나 비전 구매 및 비전 프로그램 구축 등에 소요되는 비용은 사용자들에게 부담일 수밖에 없다. 이에 로봇메이커들은 보다 쉽고, 편리하게 외부 비전을 연동하기 위한 ‘배려’를 한다. 그중 도시바기계는 한 발 더 나아가 ‘비전 캘리브레이션’ 기능을 표준으로 제공하고 있다.
목 차
1. 비전 캘리브레이션(Vision Calibration) 개요
2. 비전 캘리브레이션의 시스템 구성도
3. 설정 순서
4. 카메라 취부 방법에 의한 비전 캘리브레이션
5. 카메라 취부 형태에 의한 구분과 장·단점
1. 비전 캘리브레이션(Vision Calibration) 개요
로봇에 적용된 비전의 위치를 사용하는 방법은, 주로 제품 중심점의 정보를 X, Y, C(각도)의 정보로 받아 제품을 집고 원하는 위치에 공급하기 위해서이다. 이런 과정에서 중요한 것은 로봇이 보고 있는 영역의 좌표계와 로봇이 사용하는 좌표계가 전혀 다르다는 점이다. 이에 따라 이를 맞추기 위한 과정이 필요하다. 컨베이어 동기 기능을 예로 들면 카메라의 좌표를 로봇의 좌표와 일치시키는 과정을 캘리브레이션이라고 한다. 비전이 촬영한 정보를 Calibration Offset의 거리를 지난 위치에서 로봇을 이동시켜서 잡을 수 있는 위치의 값으로 비전에 정보를 입력, 비전이 영상을 촬영했을 때 송신되는 정보는 로봇의 좌표계로 보내지게 된다.
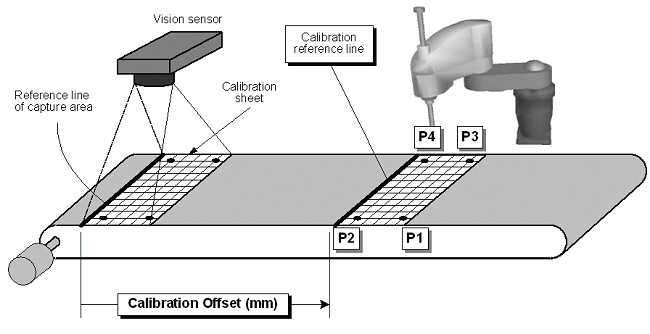
이미지. 엑트엔지니어링
이것이 가장 일반적인 방법으로서, 비전 컨트롤러 내지는 PC의 비전 프로그램이 이 연산을 할 수 있도록 기능을 가지고 있거나, 또는 이 변환 과정을 프로그래밍함으로써 로봇에 위치 정보가 송신될 때 로봇이 작동 가능한 로봇 좌표로 보내진다.
도시바기계 로봇 컨트롤러의 경우, 이런 좌표변환을 할 수 있는 기능을 내장하고 있으므로 보다 경제적이고 유연한 방법으로 비전을 연결해 사용할 수 있다. 이것을 내장 비전 캘리브레이션(Vision Calibration)이라고 한다.
이 기능은 카메라의 취부 위치, 방법에 따라 캘리브레이션 방법의 차이가 발생하게 되는데, 대략 5가지 방법으로 카메라를 취부할 수 있다.
카메라 취부 방법
- 상단 고정형
- 하단 고정형
- Z축 선단 고정형
- 2번 암 주변 고정형
- 2번 또는 1번 암 하부 고정형
가장 많이 사용되는 것은 상단 고정형으로 고정된 비전 좌표계로부터 감지된 제품의 좌표를 로봇 좌표계로 변환시키는 것이다.
Z축 선단 고정형의 경우에는 보다 더 고려를 해야 하는데 로봇의 Z축 선단에 비전 시스템이 취부돼 있기 때문에 비전이 바라보고 있는 영역이 계속 변할 수 있기 때문이다. 여기에서 로봇의 좌표계와 비전 좌표계의 캘리브레이션에 어려움이 발생될 수 있다.
반면 장점으로는 비전이 바라보고 있는 영역이 계속 움직이고 있기 때문에 제품을 검색하면서 찾고자 하는 제품이 있는 곳에서만 로봇이 제품을 핸들링하게 할 수 있다. 하지만 이 경우 계산을 해서 로봇 좌표계로 보내는 작업이 결코 만만치 않다. 이러한 경우에 비전 캘리브레이션 기능을 사용하는 것이 매우 유용하다.
2. 비전 캘리브레이션의 시스템 구성도

이미지. 엑트엔지니어링
비전 캘리브레이션 기능에 사용 가능한 비전 시스템은 형상 매칭기능이 있고 좌표 데이터를 제어기에 보낼 수 있는 기능만 있으면 되기 때문에 일반적인 비전 시스템을 사용하는 경우보다 훨씬 경제적이고 유연하게 비전을 적용할 수 있다. 아울러 OPEN CV를 사용할 수 있다면 경쟁력 있는 시스템 구성이 가능하다.
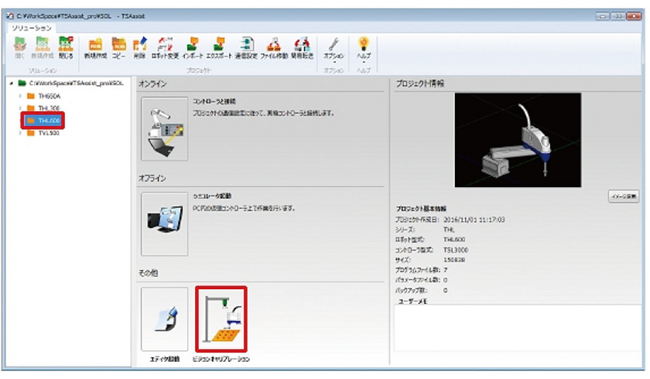
이미지. 엑트엔지니어링
이 기능의 설정을 위해서 TSAssist의 위자드 기능을 사용하면 빠르고 쉽게 설정할 수 있는데, 반드시 이 프로그램이 필요한 것은 아니다. 일반적인 문서 편집기로도 설정이 가능하지만 본문에서는 개념적인 이해를 위해서 우선 TSAssist를 이용한 설정 방법을 설명한다. (下편에 계속)
필자

엑트엔지니어링(주) 최영수 대표이사







