
‘웨어러블 로봇’ 하면 대부분 딱딱한 외골격 로봇을 떠올리기 마련이다. 그러나 이러한 외골격 로봇의 단점을 해소하기 위한 소프트 외골격 로봇 개발에 국내 연구자가 참여하고 있어 화제이다. 본지에서는 옷감과 같은 소프트한 재질로 제작된 로봇으로 인간의 능력을 향상시키는 소프트 외골격 로봇을 연구하고 있는 하버드 Biodesign Lab.의 이기욱 연구자를 소개한다.

Biodesign Lab. Harvard Univ. 이기욱 연구자
이기욱 연구자가 참여한 논문의 서지 정보 - G. Lee, H. Kim, K. Seo, J. Kim, M. Sitti, and T. Seo, “Series of Multilinked Caterpillar Track-type Climbing Robots,” Journal of Field Robotics, vol. 33, no. 6, pp. 737-750, 2016.(http://onlinelibrary.wiley.com/doi/10.1002/rob.21550/full) - G. Lee, S. Hur, and Y. Oh, “A Novel Haptic device with High-force Display Capability and Wide workspace,” in Proc. Int'l Conf. Robotics and Automation (ICRA), pp. 2704-2709, May, 2016. (http://ieeexplore.ieee.org/document/7487431/) - G. Lee, S. Park, D. Lee, F. C. Park, J. Jeong, and J. Kim, “Minimizing Energy Consumption of Parallel Mechanisms via Redundant Actuation,” IEEE/ASME Transactions on Mechatronics, vol. 20, no. 6, pp. 2805-2812, 2015.(http://ieeexplore.ieee.org/document/7217819/). |
Q. 귀하의 연구에 대한 소개.
A. 사람의 운동 능력과 에너지 효율을 향상시켜줄 수 있는 소프트 외골격 로봇을 연구하고 있다. 통상적으로 외골격 로봇이라고 하면 대중들은 아이언맨의 수트와 같이 굉장히 단단하고 튼튼한 재질의 외골격 로봇을 떠올릴지도 모르지만, 우리가 연구하고 있는 외골격 로봇은 가볍고 유연한 재질을 이용한, 일명 ‘Soft-exosuit’로, 실제 의류에 사용되는 옷감(Textile-based Architecture)을 이용한 로봇이다. 현재 하버드대학교 Biodesign Lab.의 Conor Walsh 교수 연구 그룹에서 Soft-exosuit의 기계 시스템 개발 및 제어기 설계를 담당하고 있다.
Soft-exosuit 소개 영상(사진. 유투브 갈무리)
Q. Soft-exosuit란 무엇인가.
A. 수십 년 전부터 사람의 운동 능력 및 에너지 효율을 향상시키기 위해 다양한 외골격 로봇이 여러 대학과 연구기관에서 개발되어 왔다. 걸음이 불편하거나 하반신 마비로 인해 다리를 쓸 수 없는 장애인의 보행을 도와주는 로봇, 무거운 짐을 쉽게 들 수 있게 하거나 극한의 상황에서 사람의 운동 능력을 향상 시켜주는 로봇, 군사용 로봇 등 다양한 목적과 용도에 따른 외골격 로봇 연구가 현재까지 활발히 진행되고 있다. 이러한 연구들은 실제로 좋은 결과를 보였으나, 일반적으로 단단한 재질로 구성되어 있어 실제 사람의 자연스러운 움직임을 방해하거나 자유도를 억제하여, 원치 않는 방향으로 힘이 가해지고 부상의 위험이 있다는 문제점이 있었다. 또한 단단한 재질의 특성상 로봇 자체의 무게와 관성의 영향을 무시하기 어렵다는 한계점을 보이기도 했다. 이에 지난 몇 년 간, Herr, Collins, Sawicki, Herman vander Koi, Samsung 등 많은 연구팀에서 이를 보완한 다양한 외골격 로봇 개발을 진행하고 있다.
우리 연구팀에서도 기존 외골격 로봇의 기능은 그대로 유지하면서 단단한 재질 때문에 야기되는 문제점들을 완화시키기 위해 소프트한 재질을 이용한 소프트 외골격 로봇을 개발·연구 중에 있다. 사실 Soft-exosuit는 옷감과 같은 소프트한 재질로 제작된 로봇이기에 사람이 로봇을 착용하는 개념보다는 로봇 옷을 ‘입는다’는 개념이 더 적합하다. 이처럼 소프트한 재질을 통한 구성은 착용자의 자유도를 억제하지 않아 훨씬 더 자연스러운 움직임이 가능하게 하고, 무게가 가볍고 착용이 매우 용이하며 장시간 사용 시에도 몸에 전혀 무리가 가지 않게 한다.
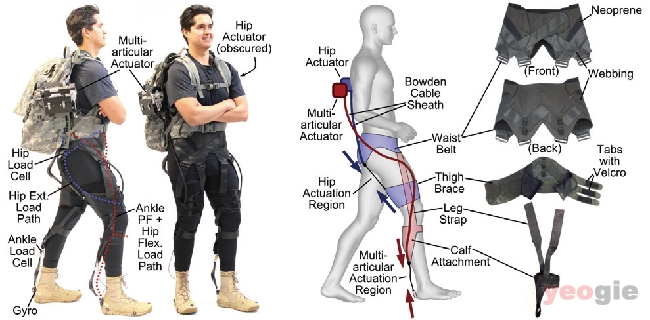
Soft-exosuit 구성 요소 : Hip Extension(Mono-articular)을 보조해주는 기능과 Ankle Plantarflexion
및 Hip Flexion(Multi-articular)을 보조해주는 기능을 한다(자료. Asbeck et al, ICRA2015).
Soft-exosuit는 허리에 찬 구동장치에 연결된 2개의 와이어의 힘으로 움직인다. 이 로봇을 입은 후 걸음을 내딛는 동작을 취하면 옷에 부착된 센서가 걸음 동작을 감지하며, 인식된 동작에 맞춰 한 걸음씩 다리를 내딛을 때마다 2개의 와이어가 양쪽 다리를 차례로 잡아당겨주게 된다. 평소 걸음에 필요한 힘과 에너지를 Exosuit가 대신 쓰게 되면서 착용자가 훨씬 더 쉽게 걸을 수 있다는 것이 핵심이다. 즉, 로봇 옷과 와이어가 제2의 근육의 역할을 해주는 것이다. Exosuit는 현재 미국 국방부 방위고등연구계획국(DARPA)의 지원을 받아 군사적 목적으로 개발되었으며, 군장과 같은 무거운 짐을 메고도 장시간 군사활동이 용이하도록 발전시키고 있다. 실제로 Exosuit를 착용한 후 본인 몸무게의 30%에 해당되는 짐을 지고도 7% 이상 운동 효율이 높아지는 결과를 얻었다.
현재 우리 팀에서 진행 중인 군사용 외골격 로봇 연구를 포함해 전 세계 각국의 연구소와 군사용·산업용·환자용 외골격 로봇 개발에 매진하고 있으며 이 중 일부는 상용화가 추진되고 있다. 바이오 메커니즘과 엔지니어링의 학문적 융합을 통해 과거 인류가 해결하지 못했던 인간의 신체적·물리적 한계를 극복하고 더 나아가 소멸된 기능까지 소생시키는 시대가 도래한 것이다. 가까운 미래에는 군사용·산업용·환자용에만 국한된 외골격 로봇의 응용 범위를 더욱 확대하고 효율성과 경제성까지 보완해 외골격 로봇이 인간의 삶을 풍요롭게 하는 또 다른 중요한 도구로 보편화되기를 기대한다.
Q. 연구 중 어떤 극복해야 할 문제가 있었고, 이를 어떻게 해결했나.
A. Soft-exosuit는 아무래도 사람이 직접 입고 사용하는 로봇이기에 기존의 로봇들과는 다르게 고려해야 할 요소들이 많다. 특히 무게와 에너지 효율이 현재 가장 큰 이슈이다. 사람이 불편을 느끼지 않으면서 장시간 사용이 가능하도록 하기 위해서는 최대한 가볍게, 그리고 에너지 효율을 높게 만들어야 한다. 이를 위해 다양한 시도와 실험을 통해 최적의 기구 디자인을 검토해나가고 있으며, 모터 및 기어와 같은 기계적 요소들을 최적으로 계산해 목적에 맞게 Customizing Design해 사용하고 있다.
그 뿐만 아니라, 안전도와 견실성에 대한 평가도 중요하다. 안전성이 보장되지 않은 개발 단계에서는 사람이 직접 입고 실험을 할 수 없기에 저희 팀에서는 실제 사람이 착용한 것과 같은 조건에서 테스트 할 수 있는 마네킹 실험 장치를 제작했다. 매번 새로운 버전의 Soft-exosuit를 개발할 때마다 마네킹 실험 장치를 이용해 40마일 이상에서도 안전하고 견실하게 사용할 수 있는지를 평가하고 있고, 안전에 이상이 없다는 것이 판명되면 그 후에 우리가 직접 Soft-exosuit를 착용하고 런닝머신 위에서 실험을 하고 있다.
또한 사람마다 신장, 몸무게, 강성, 유연성, 걸음걸이가 각자 다른데, 현재로서는 이러한 개개인의 특성에 맞춰 개별적으로 제작하는 것이 어려운 상황이다. 그렇기 때문에 Soft-exosuit를 착용한 사람마다 느끼는 효과에 큰 편차가 있다는 것이 현재 개발 단계에서 나타나는 문제점이다. 미래에는 개개인의 특성을 반영해 Soft-exosuit의 형상 및 보조하는 힘을 모든 사람에게 최적화하는 것이 목표이다.

Soft-exosuit 소개 영상(사진. 유투브 갈무리)
Q. 연구 활동과 관련된 앞으로의 계획은.
A. 현재 연구·개발 진행 중인 군사용 Soft-exosuit의 최종 시연이 2017년 4월에 진행될 예정이다. 최종 시연은 실제 군사 기지에서 진행되며, 미군이 직접 Soft-exosuit를 착용하고 3마일 이상을 걸어보면서 그 효과와 실용성을 검증하게 된다. 본 과제의 규모가 크고 국방과 관련된 연구이기에 검증 또한 상당히 까다롭게 진행이 되기 때문에, 현재 단기적인 목표는 Soft-exosuit의 최종 버전 개발에 집중해 내년까지 최종 제품을 마무리하는 것이다. 이 로봇이 군인들의 부상과 불필요한 에너지 손실을 줄여주는 등 긍정적인 역할을 할 수 있기를 기대한다.
한편 최종적으로는 사람이 일상생활에서 쉽게 착용하고 사용할 수 있는 외골격 로봇을 만드는 것이 목표이다. 외골격 로봇을 통해 사람의 운동 효율이 향상되어 일상생활에서도 더욱 편리함을 가져다 줄 것이며, 뿐만 아니라 등산, 달리기와 같은 레크리에이션 활동 시에도 부상의 위험을 줄이고 더욱 활동적인 움직임이 가능할 것으로 기대된다.
기계·건설 공학연구정보센터 www.materic.or.kr
기계·건설공학연구정보센터는 연구교류와 최신해외연구동향을 파악하기 위해 기계공학과 건설/교통공학 분야의 해외학술대회 참관기 원고를 모집하고 있다. 대상자는 2016년도 기계공학/건설/교통분야 해외학술대회에 참가 예정인 석사 이상 참가자이며, ▲설계생산 ▲열공학 ▲유체공학 ▲응용역학 ▲자동화계측 ▲기계가공 ▲건축계획 및 설계 ▲건설시공재료 ▲건축설비환경 ▲구조공학 ▲지반공학 ▲수공학 ▲교통/측량 분야 등과 관련된 학술대회에 대한 현장사진 포함 10~20p 내의 원고를 제출하면 된다. 참관기에 선정된 대상자는 박사과정 이상(석·박사 통합과정 3학기 이상 및 회사연구원 또는 직장인)은 20만 원/편(부가세 포함), 석사과정은 15만 원/편(부가세 포함)이다. 원고 양식과 관련해 보다 자세한 사항은 전화 또는 메일(TEL : 051-510-1384, E-mail : ariass@naver.com)로 문의할 수 있다. |







