
수술로봇 다빈치에 숨겨진 ‘39개의 맥슨모터’를 찾아라!
손상을 최소화하는 수술용 로봇
다빈치 수술 로봇 시스템의 최신 버전에서 사용된 주요 부품 리스트에는 저속에서도 코깅 없이 구동하는 고품질의 맥슨 모터가 포함되어 있다.
최근 차세대 수술법으로 손상을 최소화하는 Intuitive Surgical社의 da Vinci™S HD(이하 ‘다빈치’) 수술로봇 시스템이 점점 더 폭넓게 사용되고 있다. 이 시스템은 최고의 모션컨트롤 기술을 적용하여 저속의 계산된 속도에서도 숙련된 의사를 연상시키듯 모든 동작이 부드러우면서 정확하다.
지난 몇 년간 모션컨트롤 분야에서 기술적 진보가 계속되어 왔듯이 Intuitive Surgical社 역시 최고의 부품과 제어기를 사용하여 의료 부문 최고 권위의 다빈치 수술로봇 시스템을 지속적으로 업그레이드 하고 있다. 다빈치 시스템에는 총 39개의 맥슨 모터가 장착되어있다.
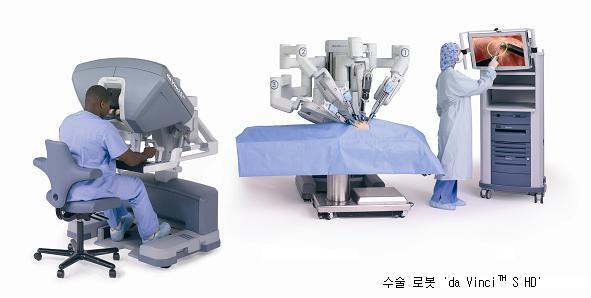
다빈치 수술 로봇 시스템
이 외과수술 시스템에서는 한 쌍의 수술용 로봇 팔(매니퓰레이터)과 카메라를 삽입하기 위해 환부에 8mm, 12mm의 작은 절개부 3개만이 필요하다. 수술이 진행되는 동안에는 로봇과 보조자만이 환자 옆에 위치하게 되며, 의사는 수술 주조정장치를 통해 정밀하게 진행되는 개방형 수술을 직접 보고 느낄 수 있다.
다빈치는 수술실에 꼭 필요한 시스템이다. 다빈치는 수술에 참여한 다른 구성원처럼 전체 외과수술 팀을 보조해야 한다. 이 시스템의 전체구성은 수술콘솔, 수술도구를 보유한 환자용 카트, 영상처리장비 이렇게 3개 군으로 나뉘어져 있다.
수술콘솔은 다빈치가 수술을 수행하는 데 있어서 가장 중요한 부분이다. 영상을 통한 수술은 극히 고난이도의 작업이며, 가장 일반적인 어려움은 의사가 처리해야 하는 방향전환이다.
젓가락으로 신발 끈을 맨다고 생각해 보라. 젓가락을 왼쪽으로 옮길 때 그 끝은 오른쪽으로 이동한다. 이것이 바로 기존의 복강경 수술에서 생길 수 있는 반직관적인 움직임이다. 이 반직관적인 움직임은 의사의 경험을 통해서만 극복할 수 있는 부분이었다.
다빈치를 통해 의사는 콘솔에서 수술 현장을 영상화한 최고의 3-D HD 화상을 보면서 수술을 집도 할 수 있게 되었다. 3D HD 영상을 통한 세계 최초의 로봇수술시스템으로써, 다빈치는 기존 모델에 비해 2배 이상 향상된 해상도를 통해 더욱 개선된 선명도, 조직 단면 및 중요 해부학적 세부사항을 제공할 수 있게 되었다.
다빈치가 사용하고 있는 InSite™의 비전시스템, 고해상도 3-D HD 내시경 및 화상처리장치는 수술현장에서 실물과 똑같은 이미지를 제공한다. 수술영상은 이미지 동기장치, 고강도 조명기와 카메라 제어장치를 사용하여 더욱 선명하게 최적화되었다.
또한 수술콘솔에서 의사는 수술동작을 재현하는 마스터를 사용하여 수술을 한다. 의사는 손목과 그의 눈에 비례하여 자연스럽게 위치한 디스플레이 아래의 마스터 컨트롤을 손가락으로 잡는다. 그러면 의사의 정밀한 실시간 동작이 환자의 수술 부위에 그대로 전달된다.
로봇 팔(매니퓰레이터)은 기존의 수술방식처럼 의사가 손목, 손, 손가락의 움직임으로 컨트롤하게 된다. 다빈치에는 EndoWrist™의 기구가 적용되었으며 이 기구들은 인간의 손목 동작을 본뜬 7단계 동작으로 설계되었다. 각각의 기구들은 고정, 봉합, 조직수기와 같은 특정 수술역할을 수행한다.
환자용 카트에는 의사의 동작을 재현하는 2개의 로봇 팔과 한 개의 내시경 팔이 있다. 추가 내시경 기구 및 수술능력을 더욱 높여주는 제 3의 로봇 팔은 옵션사양이다.
복강경 수술 팔은 환자의 체벽 이용을 제거하면서 수술구멍에서 회전하는데, 이 방법은 조직과 신경 손상을 최소화 하게 된다. 수술 팀은 수술 시 사용 사용하게 될 기구를 정확하게 설치하고 환자의 수술구멍을 준비하며 사용될 복강경 수술 팔과 기타 각종 도구의 관리를 지원한다.
모터의 선택
고정밀 모션컨트롤은 우선 체내 수술을 위한 소형(8~10mm) 구멍으로 조종할 로봇수술기기를 통과 시킬 때 필요하다. 각 조종장치의 핵심이 바로 맥슨의 DC 서보모터이다.
Intuitive Surgical社의 생산기술 책임자인 Mike Prindiville은 “시장에는 선택 가능한 많은 제품이 있지만 맥슨모터는 언제나 성능과 품질에 대한 요구를 만족시키며 우리 제품의 성공에 있어서 훌륭한 파트너이다”라고 말한다.
맥슨모터는 다빈치 시스템의 입력과 출력을 모두 책임지고 있다. 연속된 피드백 컨트롤을 통해 모터와 엔코더는 의사로부터 입력 신호를 받고, 콘솔 컨트롤러를 통해 실시간으로 전송되며, 조정장치(매니퓰레이터)에서 모터로 출력신호를 보내게 된다. 즉, 조정장치(매니퓰레이터)는 콘솔 컨트롤러를 통해 의사의 손으로 힘을 다시 보내게 된다.
Intuitive社의 엔지니어는 엔코더를 결합하거나 결합하지 않은 RE25가 포함된 30개 이상의 맥슨모터를 사용하여 다빈치를 설계해왔다. GP13 기어헤드와 13mm 마그네틱 엔코더가 결합된 RE13, 특수 엔코더가 결합된 RE35 시리즈의 모터들이 해당된다.
맥슨모터는 고정자를 희토류 영구자석으로 설계하고 코어리스 로터를 사용하며 마그네틱 코깅 현상을 제거하여 특히 저속 구동 시, 기존의 모터에 비해 더 큰 만족을 얻을 수 있다. 맥슨모터는 Intuitive社의 어플리케이션에 있어서 핵심 요소인 신형 고출력 디자인과 부드러운 회전에 대한 요구를 만족시켰다.
의사용 카트에 사용되는 모터는 2개의 역할을 구별하기 위해 마스터로 불린다. 슬레이브 또는 매니퓰레이터 모터 역시 같은 정밀함이 요구될 뿐 아니라 수술 보조자가 작동체 끝을 적당한 위치로 이동시키는 동안, 역구동성(back-drivability)이 있어야 한다. 모터는 기계의 끝에서 약간의 이력현상을 보인다.
결론
다빈치 로봇 수술 시스템은 매우 상업적인 의료기술이며, 의사에게 직관적인 컨트롤, 다양한 움직임, 섬세한 조직수기 능력 및 개방성 수술의 3-D 영상을 제공하며 작은 절개부를 통해 손상을 최소화 할 수 있도록 한다.
최신 기술을 사용하여 제작, 생산된 정밀 모터 및 기타부품들은 다빈치와 같은 시스템이 시장에서 인정받을 수 있도록 한다.
다빈치는 SRI(Stanford Research Institute)에서 개발된 로봇수술기술을 기반으로 개발되었다. Intuitive Surgical社는 다빈치의 성능 향상을 위해 IBM, Massachusetts Institute of Technology, Heartport와 협력관계를 구축하였다. 다빈치는 담낭 및 결장수술과 같은 복부수술, 심장을 제외한 흉부수술, 전립선수술 시 사용할 수 있도록 FDA로부터 승인을 받았다. 다빈치는 이미 유럽에서 심혈관 수술에 이용되고 있다.
Intuitive Surgical社의 생산기술 책임자인 Mike Prindiville은 “언제나 우리는 전 세계의 환자, 의사, 병원에 큰 만족을 가져다주는 다빈치에 적용된 수만 개의 맥슨모터를 모두 믿고 신뢰한다. 맥슨모터는 지금까지 높은 신뢰성, 낮은 마찰 및 긴 수명에 대해 믿을 수 있는 성능을 보여주었다. 다빈치는 마찰, 백래쉬, 응답성 및 광범위한 센서 피드백 모니터링을 포함해 모든 성능에 대한 중요한 테스트를 마쳤다”라고 전했다.







