
<편집자주>
기계·건설공학연구정보센터가 로봇 분야에서 보기 드문 여성 과학자를 소개했다. 독일 뮌헨공대에서 조교수로 재직 중인 이동희 교수는 국내와 다른 로봇 연구 환경에서 다년간 로봇을 연구해오며, 입지를 다져왔다. 본문에서는 그녀의 로봇 연구와 해외의 연구 환경 등 다채로운 이야기를 기계·건설공학연구정보센터 정병규 팀장의 도움을 받아 담았다.
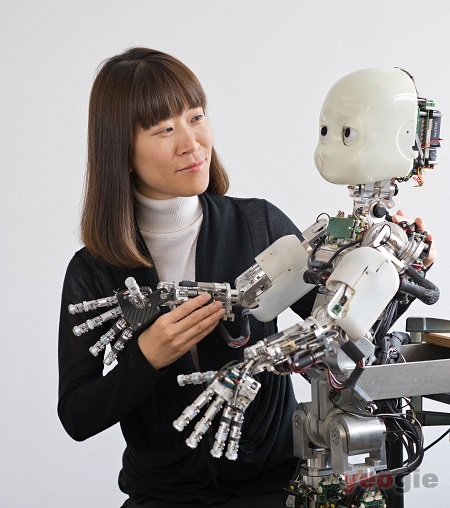
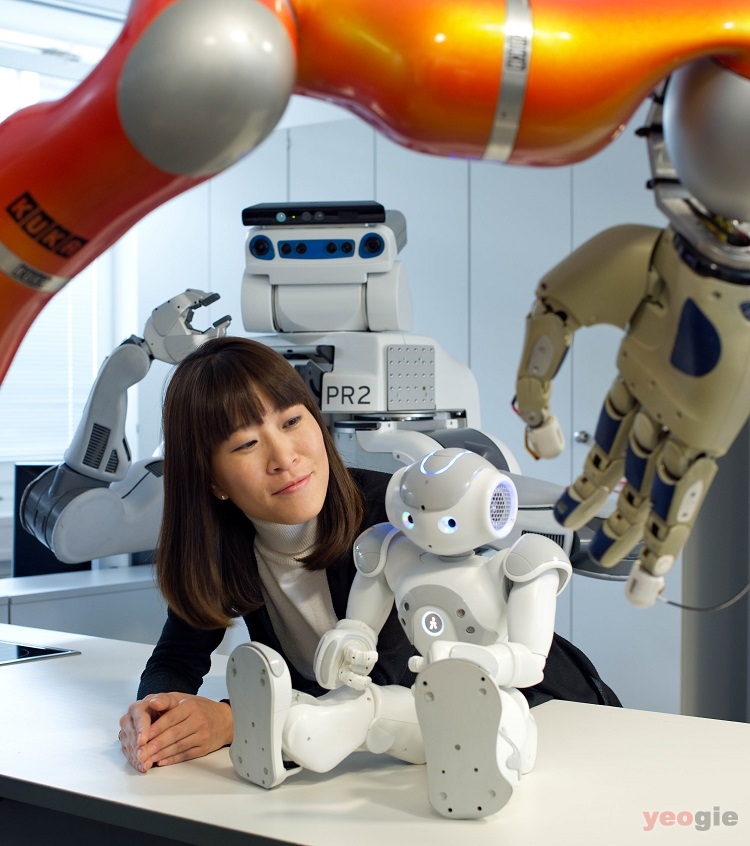
Technical University of Munich 이동희 교수 독일 뮌헨공대(Technical University of Munich)에서 인간과 로봇 상호 작용 (Human-Robot Interaction), 로봇학습(Machine Learning)에 대해 연구하고 있는 그녀는 경희대를 졸업하고 일본 도쿄대학의 Yoshihiko Nakamura 교수의 지도 아래 박사과정을 수료했다. 현재 뮌헨공대 조교수로 재직 중인 그녀는 로봇 분야에서 흔치 않은 여성과학자이자, 일본과 독일에서 다년간 로봇 연구를 해오며 다수의 로봇관련 논문을 발표한 연구자이다. 특히 최근에는 독일 Helmholtz Association에서 수여하는 Helmholtz Professorship을 수상하며 주목받는 인재로 떠오르고 있다. |
Q. 교수님과 연구에 대한 소개.
A. 뮌헨공대(Technical University of Munich, TUM), Electrical and Computer Engineering학과에서 조교수로 재직 중으로, Dynamic Human Robot Interaction Lab.을 이끌고 있다. 우리 랩에서는 인간의 학습 방법에서 영감을 받아 로봇공학에서도 유용한 로봇 학습 방법 등 로봇 학습에 관한 연구를 진행하고 있다.
Q. 주로 인간과 로봇 상호 작용(Human-Robot Interaction, HRI), 그리고 Machine Learning에 대한 연구를 진행하고 있다. 연구 분야에 대한 소개와 현재 교수님이 진행 중인 연구에 대해 소개하자면.
A. HRI와 Robot Learning이 Dynamic Human Robot Interaction Lab.이 진행하는 로봇 연구의 가장 중요한 2개의 키워드이다. Robot Programming by Demonstration, Motor Skill Learning for Manipulation Tasks and Locomotion Tasks, Human Robot Cooperation과 같은 연구를 진행하고 있다.
Robot Programming by Demonstration은 인간의 모방학습과도 연관이 있는 개념으로, 예를 들어 우리가 새로운 스포츠를 배울 때, 우리는 전문가의 행동을 모방하기도 하고, 또는 코치가 우리의 자세를 교정해주기도 하며, 어려운 스포츠일수록 전문가의 코칭만으로 끝나지 않고 반복적인 연습이 필요하다. 이와 같은 과정을 거치면서 학습을 하는데, 이와 비슷한 개념을 로봇공학에 적용해 로봇의 새로운 동작, 행동을 프로그래밍하는 연구이다. 배우는 사람과 가르치는 사람 사이의 상호작용을 통한 학습을, 배우는 로봇과 가르치는 사람의 상호작용으로 보고 사람의 동작을 로봇이 모방하면서 첫 번째 학습과정을 거친다. 그 후 필요에 따라서 코치는 첫 번째의 학습과정을 거친 로봇의 동작을 신체적 상호작용(Physical Interaction)을 통해 교정시켜준다.
사람의 행동을 로봇이 모방하는 것은 Human Robot Interaction의 한 예이고, 코치의 교정은 대개 신체적 접촉을 통해 이루어지므로, 이는 Man Machine Interaction, Machine Learning, 그리고 제어의 문제가 서로 맞물려 있다. 또 실질적인 응용의 측면에서, 로봇공학 전공자가 아니고 컴퓨터 프로그래밍 언어를 모르는 일반사람들도 쉽고 직감적으로 로봇 프로그래밍을 할 수 있도록 고민하면서 이 연구를 진행하고 있다.
일차적인 모방학습, 이차적인 코치의 교정, 개선을 통한 학습 이후, 사람이 연습을 통해 기술을 발전시켜 나가듯이 강화학습의 개념을 도입해 로봇이 주어진 과제를 습득하는 것을 심층적으로 발전시킨다. 우리 랩에서는 이러한 학습 알고리즘을 로봇의 단순한 움직임의 학습에서 시작하여 Manipulation 작업, 이족 보행(Bipedal Locomotion), Robot Vision 문제, 그리고 인간과의 협업의 학습까지 적용시킬 수 있다.
Manipulation 작업의 경우는 움직임, 힘 그리고 Impedance Behavior를 학습한다. 또 이족보행의 경우는 실시간으로 인간의 보행을 모방제어하는 알고리즘, 실시간으로 안정적인 보행을 하도록 학습하는 방법 등을 연구한다.
더불어 로봇 비전의 경우에는 인간의 운동을 Recognition하고 Reconstruction하는 알고리즘, 그리고 Model-Free 물체의 Segmentation, Tracking을 하는 알고리즘 등을 개발하고 있다. 마지막으로 인간과 로봇의 협업과제에서는 인간과의 상호작용을 하면서 점진적으로 인간의 정형화된 패턴을 학습하고 예측함으로써, 협업에 필요한 Assistance을 지연 없이 제공하는 연구를 하고 있다.
Q. 향후 HRI에 대한 전망이나 풀어야 할 과제는 무엇인지.
A. Programming by Demonstration 분야의 연구는 다양한 맞춤형 상품을 생산하는 중소기업의 로봇 솔루션으로서 미래의 산업 로봇에 큰 영향을 미칠 것으로 예상된다. 현재의 단순한 Gravity Compensation Controller에서 Physical Interaction Force를 고려한 제어기술과, 학습방법이 통합된 솔루션이 개발될 것으로 예상된다.
Manipulation 기술에 로봇 학습알고리즘을 적용함에 있어서도, 정해진 단순한 Pick and Place에서 벗어나 얼마나 다른 물체, 다른 환경, 다른 로봇 하드웨어에 적용가능한지의 Scalability의 문제가 더욱 중요하게 나타나리라 여겨진다. 예전의 연구는 대개 Robotics, Control, Learning의 각각의 문제로 보고 해결했다면, 점점 학제간의 연구(Interdisciplinary Research)가 부각되고 있다.
Q. 일본 도쿄대학에서 Yoshihiko Nakamura 교수 밑에서 박사과정을 마치고 현재 독일 TUM의 조교수로 있다. 이 과정에서 어떠한 어려움들이 있었나.
A. 물론 일본과 독일의 문화가 한국의 문화와 다른 점이 분명히 있고, 다른 나라, 다른 문화로 인한 어려움을 느낀 적이 있지만, 이러한 문화적 차이에서 발생되는 어려움보다 연구자로서 겪었던 어려움이 더욱 빨리 느껴졌다.
Nakamura Lab.에서의 박사과정 중 느꼈던 가장 큰 어려움은, 연구자의 자질을 갖추는 일이었다. 지도교수가 시키는 걸 하는 게 아닌, 자신의 독자적인 연구 능력을 쌓는 법에 대해 배우는 과정에서 좌절도 경험했다.
한편 언어적인 측면에서, 독일어는 일본어보다 더 배우기 어렵기는 했지만, 전반적으로 독일에서의 삶은 좀 더 여유로웠던 것 같다. 문화적으로 차이가 클 때, 오히려 그 차이를 쉽게 인정하고 받아들일 수도 있다고 생각한다. 비록 규모가 크지는 않지만 내 연구소를 꾸려나가는데 있어 소소한 성취감도 느꼈다.
Q. 한국과 일본, 독일의 연구실을 모두 겪었다. 어떤 차이가 있나.
A. 한국과 일본의 경우, 연구실이 불이 꺼지지 않는 다는 점은 비슷한 것 같다. 평상시에도 밤 12시에 연구실에 남아 연구하는 동료들을 보는 일이 자연스러웠고, 중요한 프로젝트 마감 전에는 며칠 동안 연구실을 떠나지 않고, 침낭, 야전침대 등에서 새우잠을 자는 풍경을 흔히 볼 수 있었다.
한편 한국과 일본이 연구와 일상의 경계가 모호한 생활 속의 연구 중심이라고 한다면, 독일은 그 경계가 뚜렷하다. 일찍 출·퇴근을 하고, 퇴근 후 가족들과, 혹은 자신을 위한 시간을 보내려고 노력한다.
개인적인 생각으로, 독일은 실용적인 것을 많이 추구하고, 팀워크도 중요시한다. 반면 일본에서는 간혹 ‘왜 이걸 하고 있나’라는 생각이 드는 독특한 연구를 하도록 하는데, 여기에서 독창성 있는 연구들이 나오는 것 같다.
Q. 현재 Dynamic Human-Robot-Interaction에 연구팀을 이끌고 있다. 이 팀에 지원하려는 한국 연구자들이 많을 듯한데, 어떠한 자격요건이 필요한가.
A. 팀원을 뽑을 때 특히 중요하게 생각하는 건, 이 사람이 독립적인 연구를 할 역량을 가지고 있는가에 대한 부분이다. 또한 팀워크를 중요시하는 인재를 선호한다.
Q. 많은 여성 과학자들, 특히 로봇 분야에서는 롤 모델이 되었다. 귀하와 같은 여성 과학자 혹은 여성 유학 준비생들에게 도움이 되는 말을 전한다면.
A. 어느 곳이든 유리천장(Glass Ceiling)은 존재할 것이다. 그게 여성이어서, 혹은 외국인이어서 일수도 있다. 이에 따른 어려움과 보이지 않는 차별이 존재하겠지만, 그것이 전부는 아니라는 점에 초점을 맞춰야 한다. 누구나 어려움은 있다. 그 어려움이 이겨낼 수 있는 어려움이라면 도전해볼 수 있다.
개인적으로, 독일에서 로봇을 연구하는 한 한국 여성 연구자의 예를 통해 “나도 할 수 있다”라는 믿음을 갖고 노력하면 좋겠다.
Q. 현재 한국의 교수평가는 SCI 논문의 편수라는 객관적이고 정량적인 잣대에만 의존해 문제점이 지적되고 있는데, 독일의 교수평가 방식은 어떠한가.
A. 독일의 교수평가에는 한국과 같은 정량적인 잣대는 없다. 미국의 경우는 평가항목과 어느 정도의 기준(Threshold)을 알려준다고 하는데, 독일은 단순히 평가항목만을 알려준다. 예를 들면 연구, 강의, 펀딩, 수상, 논문 실적이 중요하다, 이런 정도이다. 논문 실적은 논문의 편수가 아닌, 가장 중요한 논문 3~5편만을 평가한다. 논문 평가에 있어서는 H-index를 중요하게 생각하며, 특히 연구 분야의 대가인 외부 검토위원들을 초빙해 평가하는데, 그들의 의견이 매우 중요하게 작용한다.
기계·건설공학연구정보센터 ww.materic.or.kr







