
훼스토(Festo) BLN(Bionic Learning Network)의 매력은 매년 우리에게 새로운 영감을 준다는 점이다.
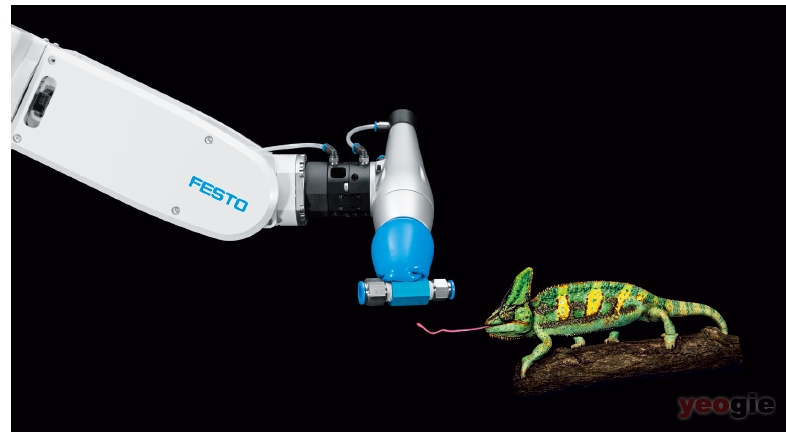
올해 훼스토가 공개한 작품 역시 마찬가지다. 훼스토는 개미와 나비, 그리고 카멜레온을 모사한 생체모사 로봇을 공개했다. 그중에서 카멜레온의 혀를 모사한 ‘플렉스셰입그리퍼(FlexShapeGripper)’는 특히 그 활용성이 돋보인다.
훼스토는 모든 종류의 로봇 중 가장 큰 시장을 차지하고 있는 제조용 로봇에 범용적으로 사용되던 핑거형 그리퍼 대신 플렉스셰입그리퍼를 장착해 선보임으로써 보는 이로 하여금 그 활용성을 기대하게 만들었다. 한 가지 차이점은, 기존의 철제 그리퍼와 달리 쉽게 파손될 수 있는 물체도 유연하게 파지할 수 있다는 점이다.
손가락이 필요 없는 그리퍼
‘집는’ 행위를 위해서는 당연히 손가락이 필요하다. 대부분의 수직다관절 로봇에 장착된 그리퍼들이 2조, 3조 등 핑거를 보유한 이유이다. 물론 특수한 분야에서 진공 흡입을 이용한 방식의 그리퍼들이 활용되고 있지만, 이는 최소한의 흡입을 위한 면적이 보장되어야 한다.
오슬로 대학과 공동으로 개발을 진행한 플렉스셰입그리퍼는 이러한 불편을 해결하기 위해 ‘집기 위해서는 손가락이 필요하다’라는 고정관념을 타파했다.
플렉스셰입그리퍼의 파지 방식은 엠파이어 로보틱스의 VERSABALL과 닮아 있다. ‘집는’ 행위 대신 카멜레온의 혀와 같이 부드러운 실리콘 캡을 이용해 어떤 형태의 물건이든 자유롭게 옮긴다. 이 실리콘 안에는 공기와 물을 채워 물건을 ‘집는’ 대신 ‘감싸 안아’ 파지한다.
이 실리콘은 일정한 기압을 가한 듀얼 체임버로 구성되어 있다. 항시 물이 채워진 체임버와 기체가 채워진 체임버는 물체를 파지할 때마다 물체의 형태에 맞춰 기체의 양을 변경시키고, 그리퍼의 재질인 실리콘은 자유자재로 모양을 변형시킬 수 있다.
이처럼 파지 대상물의 형태에 따라 자유자재로 수축과 이완을 반복하며 찌그러질 수 있기 때문에 전선에서부터 머그컵, 볼 베어링, 안경, 펜 등 기존의 로봇 그리퍼가 집기 힘든 물건들을 파손시키지 않고 옮길 수 있다.
실용성을 겸비한 플렉스셰입그리퍼
이 그리퍼가 지니는 또 다른 장점은 전원을 차단시켜도 형태를 그대로 유지한다는 점이다. 이는 곧 실제 활용 상황에서 발생될 수 있는 부득이한 다운타임에서도 물체를 파손시키지 않으며, 한편으로 파지 상태를 지속할 경우에는 전원을 차단함으로써 에너지를 절약할 수도 있다.
또한 공압 방식을 채택한 이 그리퍼는 들어 올릴 때와 마찬가지로 자연스럽고, 부드럽게 물체를 내려놓을 수 있다.
한편 훼스토측은 “단순히 사람들의 흥미를 끄는 수준에서 멈추는 것이 아니라 실제로 사용할 수 있도록 노력을 기울이고 있다”고 전했다.
한국훼스토(주) www.festo.co.kr







