
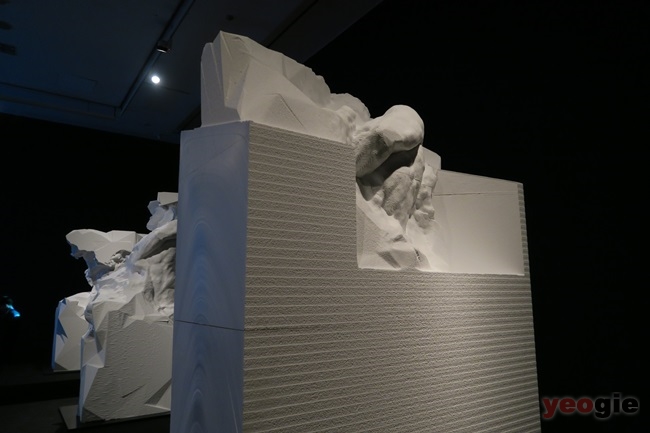
현대 미술 전시회 ‘피스마이너스원 : 무대를 넘어서’가 서울시립미술관에서 8월 23일까지 열린다. 이번 전시회에는 한국델켐(주)의 PowerMILL Robot을 이용하여 제작된 영국 콰욜라(Quayola) 작가의 조각상 작품도 전시되어 로봇 업계의 이목을 끌고 있다. 특히 이번 전시회는 YG엔터테인먼트와 서울시립미술관이 공동으로 주최하고, 가수 G-Dragon의 참여로 큰 화제가 되기도 했다.


영국 콰욜라(Quayola) 작가의 조각상 작품은 국내에서 최초로 CAM 소프트웨어를 접목해 로봇을 구동시켜 예술 작품을 제작했다는 것에 큰 의미가 있다.
콰욜라 작가 또한 최초 시도에 의의를 두며 작품을 한국에서 직접 제작하기로 결정했다. 이후 DRB 인터내셔널 Campus D 사업부와 DRB 파텍이 전체적인 작품 제작 총괄과 기술 지원을 맡아 프로젝트를 진행해왔다.
DRB 인터내셔널과 DRB 파텍은 콰욜라의 가치관을 조금 더 정확하게 표현하고 로봇에CAM 소프트웨어를 효율적으로 접목시키기 위하여 로봇 다축 가공에서부터 엔진 포트 가공에 이르는 다양한 전문적인 영역들을 커버할 수 있는 로봇 전용 솔루션을 보유한 한국델켐(주)(이하 한국델켐)과 기술 미팅을 갖고 협업 체제를 추진했다.


PowrMILL Robot, 쉽고 간단한 로봇 제어 작업의 실현
일반적인 로봇 제어 작업의 경우, 로봇 엔지니어가 펜던트를 일일이 수작업으로 처리해야 한다. 평균적으로 조각상 1개를 제작하기 위해서는 수십만 개의 로봇 움직임에 대하여 일일이 Point를 지정해주어야 하는데, 엔지니어가 직접 정확한 Point를 지정하는 것은 매우 복잡하고 어려운 일이며 사실상 불가능하다.
하지만 한국델켐의 PowrMILL Robot을 사용하면 모든 공구의 수작업이 필요 없고, 로봇을 프로그래밍하는 것이 일반적인 다축 공작기계와 같이 간편하기 때문에 쉽고 간단한 로봇 작업이 가능하다.
또한 PowrMILL Robot은 간단하고 다양한 툴패스 편집 기능을 제공함과 동시에 단일 어플리케이션을 통하여 완벽한 프로그래밍과 시뮬레이션이 가능하다. 따라서 로봇의 많은 축을 제어하기 위한 기존의 복잡하고 어려운 프로그래밍 작업을 정확한 3D 시뮬레이션을 통해 로봇이 어떻게 움직일 것인지를 보여줌으로써 사용자가 쉽게 작업할 수 있도록 도와준다.


효율성 높은 로봇 구동으로 작가의 작품 세계 정확히 표현
이번 조각상 작품은 PowerMILL Robot을 통해 로봇 제어 작업을 쉽게 진행함으로써 콰욜라 작가가 추구하는 작품 세계를 정확히 표현했다는 평가를 받고 있다.
한국델켐 관계자는 “PowerMILL Robot Interface는 쉽고 빠르게 원하는 위치로 로봇을 움직일 수 있는 시뮬레이션을 생성하고, 이를 통해 로봇을 구동시킬 수 있는 언어로 바로 출력이 된다. 그리고 로봇의 작업 영역 내에서 소재의 위치를 최적화시키고, 로봇의 작업 영역과 소재에 최대한 접근할 수 있는 방법을 보여준다.”며 “이밖에도 로봇의 각도, 특이점과 관련되어 실시간으로 동적인 내용을 명확하게 확인할 수 있고, 분석 기능을 통해 로봇의 효율성 있는 구동을 실현시켜주어 콰욜라 작가의 작품제작에 효율성과 정확성을 더했다는 평가를 받았다”고 전했다.
한편, 한국델켐은 최근 세계 제조업 시장에서 뜨거운 감자로 자리 잡고 있는 로봇 제조분야에서, PowerMILL Robot이 지니고 있는 고속 가공 기능과 빠른 계산시간, 강력한 툴패스 편집 기능, 3D 시뮬레이션을 기반으로 국내 건설 시장 및 의료, 자동차 분야 등에 생산성과 효율성을 더하며 사업 영역을 확대해 나가고 있는 중이다.
한국델켐(주) www.delcam.co.kr







