리빌더AI, 휴머노이드 로봇과 결합한 피지컬 AI 적용 가능성 제시
사진. 리빌더AI AI 디자인·제조 자동화 기업 리빌더AI가 6월 17일(수)부터 6월 20일(토)까지 프랑스 파리에서 열리는 글로벌 스타트업·기술 전시회 비바테크 2026에 참가해 디자인·제조 AI 에이전트 ‘VRING

로봇 정밀 조작·자율 인식 동시 작동

왼쪽부터 서울대학교 기계공학부 박용래 교수, 조지연 연구원 / 사진. 서울대학교
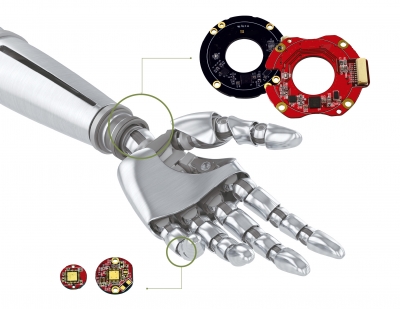
서울대학교 공과대학의 기계공학부 박용래 연구팀이 감각과 운동 기능을 동시에 수행하는 ‘지능형 인공근육’을 개발했다고 밝혔다. 이번 기술은 생물의 근육-힘줄 복합체(Muscle-Tendon Complex)를 모사해 로봇이 외부 환경을 인식하면서 동시에 움직일 수 있도록 설계된 점이 특징이다.
연구팀이 개발한 인공근육은 액정탄성체(Liquid Crystal Elastomer, LCE)에 액체금속 채널을 결합한 구조다. 전기 자극이 가해지면 수축하면서 내부 힘과 길이를 스스로 측정할 수 있어, 기존처럼 구동기와 센서를 분리해 구성해야 했던 한계를 극복했다. 이로써 수의신경계와 감각신경계를 동시에 구현하는 ‘물리적 지능(Physical Intelligence)’ 기반 구동 기술을 제시했다.
이번 연구 성과는 국제 학술지 Advanced Materials에 게재됐으며, 표지 논문으로 선정됐다.
최근 휴머노이드 로봇과 물류 자동화, 재활·의료기기 분야에서는 사람처럼 섬세하게 물체를 다루고 환경을 인식할 수 있는 구동 기술에 대한 요구가 커지고 있다. 그러나 기존 인공근육은 구동과 감지 기능이 분리돼 있어 별도의 센서와 복잡한 제어 시스템이 필요하다는 한계가 있었다.
연구팀은 이를 해결하기 위해 등방성(Isotropic) LCE와 네마틱(Nematic) LCE를 직렬 결합한 단일 구조를 설계했다. 등방성 LCE는 모든 방향에서 균일한 물성을 유지하며 힘줄 역할을 수행하고, 네마틱 LCE는 특정 방향으로 정렬된 분자 구조를 통해 근육처럼 큰 변형을 구현한다. 여기에 삽입된 두 개의 액체금속 채널은 각각 구동과 감지 기능을 담당해, 별도 센서 없이도 힘과 변형을 정밀하게 인식할 수 있도록 했다.
연구진은 해당 인공근육을 로봇 손가락과 그리퍼 시스템에 적용해 실제 성능을 검증했다. 그 결과 물체의 크기와 강도를 스스로 구분하면서도 섬세한 조작이 가능한 것으로 나타났다. 특히 두 개의 인공근육을 서로 반대 방향으로 배치한 ‘길항쌍(Antagonistic Pair)’ 구조를 통해 수축과 이완을 정밀하게 제어하며 빠른 응답성과 높은 정밀도를 확보했다.
서울대학교 기계공학부 박용래 교수는 “이번 인공근육은 생물학적 근육의 구조와 기능을 재현해 로봇이 주변 환경과 더욱 유연하고 민감하게 상호작용할 수 있도록 한다”라며 “휴머노이드, 의료 및 재활 로봇, 소프트 로봇 등 다양한 분야로 확장될 수 있을 것”이라고 밝혔다.
연구팀은 향후 인공근육의 냉각 속도를 높이기 위한 구조 최적화와 능동 냉각 기술 개발을 추진할 계획이다. 또한 이번 논문의 주저자인 조지연 연구원은 현재 박사과정에서 인공근육 자동화 제작 기술을 고도화하는 후속 연구를 진행 중이며, 향후 박사후연구원으로 관련 연구를 이어갈 예정이다.
한편 이번 연구는 서울대학교와 University of California, San Diego의 협력으로 수행됐으며, 과학기술정보통신부와 한국연구재단의 지원을 받아 진행됐다.
사진. 리빌더AI AI 디자인·제조 자동화 기업 리빌더AI가 6월 17일(수)부터 6월 20일(토)까지 프랑스 파리에서 열리는 글로벌 스타트업·기술 전시회 비바테크 2026에 참가해 디자인·제조 AI 에이전트 ‘VRING

사진. 맥슨 맥슨(maxon)이 RoboCup 2026 공식 후원사로 참여하며 미래 로봇 인재 육성과 로봇 산업 생태계 발전 지원에 나선다. 1961년 스위스에서 설립된 맥슨은 정밀 드라이브 시스템 분야의 글로벌 전문기업으로, 65년 이상의 기술력을 바탕으로 다양한 산

LG CNS(064400)가 종합 물류기업 LX판토스와 로봇 기반 ‘차세대 스마트물류 구축’을 위한 업무협약을 체결했다. 양사는 이번 협약으로 LX판토스의 메가와이즈 청라 물류센터에 휴머노이드 로봇과 셔틀 로봇을 연계한 물류 자동화 시스템을 구축한

모터114 부스 전경 / 사진. 로봇기술 모터114가 6월 10일(수)부터 12일(금)까지 서울 코엑스에서 개최되는 제15회 스마트테크 코리아(STK 2026)에 참가해 휴머노이드 로봇과 협동로봇용 조인트 모듈 및 구동 솔루션을 선보였다. 모터114는 코엑스 C홀 C1


제조 자동화의 무게중심이 ‘엔지니어링’에서 ‘로보틱스’로 빠르게 이동하고 있다. 로보틱스라는 용어는 이제 설비의 한 구성요소를 넘어 공장 자동화를 위한 보다 포괄적인 의미를 담고 있다. 이 같은 상황에서 아비만로보틱스(주)는

물류 산업의 디지털 전환은 단순 자동화를 넘어 네트워크 기반 공동화 구조로 진화하는 흐름이다. 로지스올(주)이 제시하는 ‘피지컬 인터넷(Physical Internet)’ 전략은 물류 자원의 표준화·공유를 통해 효율을 극대화하려는 시도