유일로보틱스, F&B 로봇 렌탈 시장 진출 본격화
사진. 유일로보틱스 유일로보틱스가 AJ네트웍스와 손잡고 식음료, F&B 로봇 렌탈 시장 공략에 나선다. 산업용 로봇 및 스마트팩토리·푸드테크 솔루션 전문기업 유일로보틱스는 B2B 렌탈 전문기업 AJ네트웍스와 F&B 로봇 렌탈 사업 확대를 위한

로봇 매니퓰레이터 모양 제어를 연산적으로 최적화 할 새로운 방법 개발
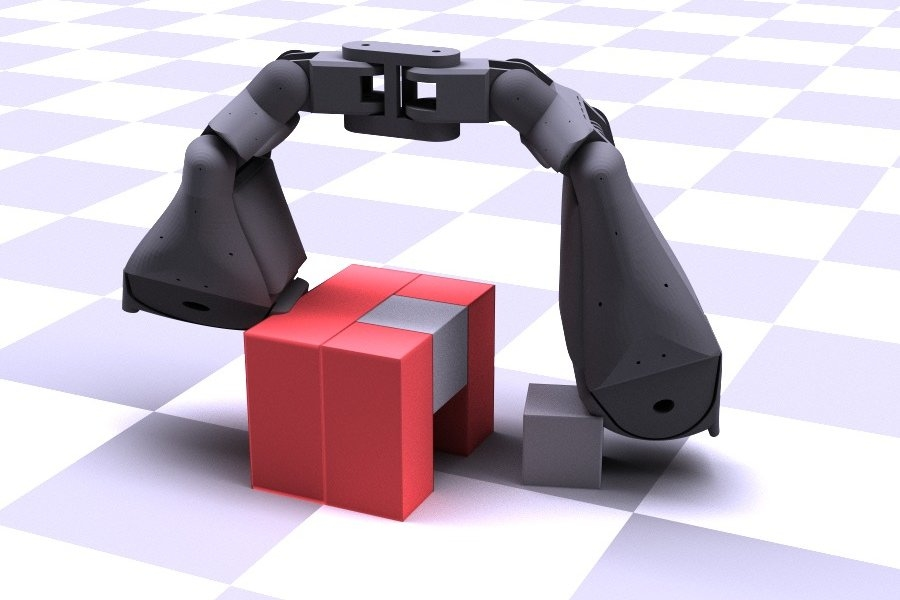
MIT 연구팀이 로봇 매니퓰레이터의 형태와 제어를 최적화하는 새로운 방법을 개발했다(사진. MIT).
미국 MIT 컴퓨터 과학 및 인공지능 연구소(CSAIL) 연구진이 특정 작업에 로봇 매니퓰레이터의 모양과 제어를 연산적으로 최적화하는 새로운 방법을 개발했다.
이 시스템은 소프트웨어를 사용해 설계를 조작하고, 로봇을 시뮬레이션한 다음, 최적화 점수를 제공함으로써 설계 및 제어를 평가한다. 이러한 작업 중심의 매니퓰레이터 최적화는 각 작업이 반복적으로 수행돼야 하는 제조 및 창고 로봇 시스템에서 광범위한 애플리케이션에 대한 잠재력을 가지고 있다.
이 시스템의 기능을 테스트하기 위해 연구팀은 우선 지상에서 상자를 뒤집을 수 있는 로봇 손가락을 디자인했다. 후크 선장의 왼손처럼 생긴 손가락 끝 구조는 상자 뒷면에 걸어서 뒤집는 알고리즘에 의해 자동으로 최적화됐다. 또한 연구팀은 두 손가락 디자인이 작은 입방체를 움직일 수 있는 더 큰 마운트에 넣는 조립 작업을 위한 모델을 개발했다. 그 결과 손가락의 길이가 서로 다르기 때문에 크기가 다른 두 개의 물체에 닿을 수 있었고, 손가락의 표면이 더 크고 평평해서 물체를 안정적으로 밀 수 있었다.
이전에는 이 공동 최적화 프로세스 구축을 위해 로봇 설계의 각 구성 요소를 단순화하고 더 원시적인 모양으로 구성했다. 예를 들어 3세그먼트 로봇 손가락을 만들 때는 3개의 연결된 실린더로 근사치를 산출할 수 있는데, 여기서 알고리즘은 원하는 설계와 모양을 달성하기 위해 길이와 반지름을 최적화한다. 이 같은 방식은 최적화 문제를 단순화시킬 수 있지만, 형상을 지나치게 단순화할 경우 설계가 더 복잡해지고 궁극적으로는 작업 난이도가 더 높아지는 문제점이 있다.
이에 연구팀은 보다 복잡한 매니퓰레이터 구축을 위해 기본적으로 사용자가 실시간으로 모양의 형상을 변형할 수 있도록 하는 케이지 기반 변형 기술을 사용했다. 예를 들어 로봇 손가락 주위에 철창처럼 생긴 것을 둘렀다고 가정했을 때 이 알고리즘은 케이지 치수를 자동으로 변경해 정교하고 자연스러운 모양을 만들어낼 수 있다. 여러 디자인으로 무결성이 유지되기 때문에 쉽게 제작할 수 있는 것이 특징이다.
한편 연구팀은 향후 소프트웨어를 확장해 여러 작업에 대해 동시에 매니퓰레이터를 최적화할 계획이다.
사진. 유일로보틱스 유일로보틱스가 AJ네트웍스와 손잡고 식음료, F&B 로봇 렌탈 시장 공략에 나선다. 산업용 로봇 및 스마트팩토리·푸드테크 솔루션 전문기업 유일로보틱스는 B2B 렌탈 전문기업 AJ네트웍스와 F&B 로봇 렌탈 사업 확대를 위한

사진. 한국AI‧로봇산업협회 한국AI‧로봇산업협회가 오는 7월 2일(목)부터 7월 6일(월)까지 인천 송도컨벤시아에서 열리는 로보컵 2026 인천의 개막식 참가 신청과 행사 사전등록을 진행한다고 밝혔다. 세계로보컵연맹과 인천광역시, 한국AI‧로봇산업협회가 공동 주최하는

B2B 렌탈 전문기업 AJ네트웍스㈜(095570)가 로봇 전문 제조기업 유일로보틱스와 식음료(F&B) 로봇 렌탈 사업 확대를 위한 업무협약을 체결했다고 25일 밝혔다. AJ네트웍스, 유일로보틱스의 MOU / 사진. AJ네트웍스 최근 로봇 시장이 다변화되면서 조리

사진. 한국로봇산업진흥원 한국로봇산업진흥원은 25일까지 미국 시카고 매코믹 플레이스에서 개최되는 북미 최대 규모의 자동화 전문 전시회 오토메이트 2026에 한국로봇관(K-ROBOT PAVILION)을 운영한다고 밝혔다. 오토메이트 2026은 미국 자동화협회(A3)가 주


제조업 전반에서 에너지 효율과 스마트 운영이 핵심 경쟁력으로 부상하면서 유압 기술도 새로운 전환기를 맞고 있다. 단순한 동력 전달 수단을 넘어 디지털 진단과 예지보전, 에너지 절감을 구현하는 스마트 유압 솔루션이 산업 현장의 관심을 끌고 있다. 독일 HAWE Hydra

클린룸 환경은 반도체, 디스플레이, 이차전지 산업의 품질 경쟁력을 결정하는 핵심 요소다. 생산 장비의 고속화가 진행되면서 케이블 보호 부품에서도 분진과 소음 저감 기술의 중요성이 높아지고 있다. 이에 씨피시스템(주)이 케이블체인과 전선관 분야의 국산화 기술을 바탕으로