터크, 경사 스위치부터 IIoT 플랫폼까지 신제품 공개
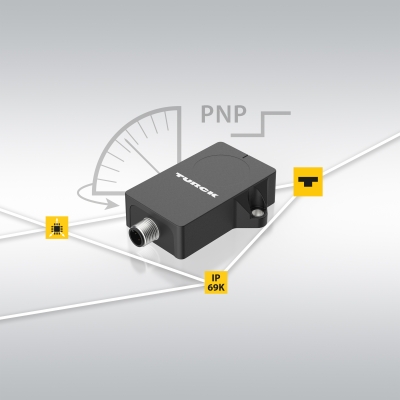
B1N180V-QR20 / 사진. 터크 산업 자동화 전문기업 터크(Turck)가 경사 스위치와 IO-Link 마스터, 유량 센서, 유도형 링 센서, IIoT 플랫폼 등 산업 현장의 디지털화와 스마트 자동화를 지원하는 신제품 및 솔루션을 잇달아 공개했다. 이번에 선보인

모바일하버, 바다로 나가다
B1N180V-QR20 / 사진. 터크 산업 자동화 전문기업 터크(Turck)가 경사 스위치와 IO-Link 마스터, 유량 센서, 유도형 링 센서, IIoT 플랫폼 등 산업 현장의 디지털화와 스마트 자동화를 지원하는 신제품 및 솔루션을 잇달아 공개했다. 이번에 선보인

사진. LS일렉트릭 LS일렉트릭이 차세대 IPC 기반 제어 플랫폼 ‘SU-CM70’을 공개하며 Software Defined Automation 시대를 겨냥한 자동화 플랫폼 전략을 본격화했다. SU-CM70은 초고속·다축 모션 제어와
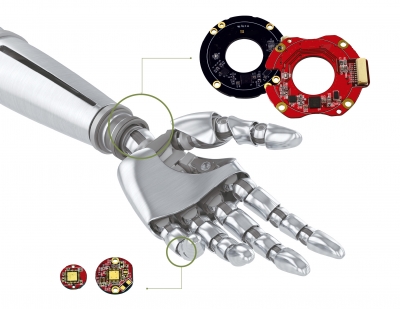
사진. 엔알티센서스 기존 엔코더 구조의 한계 개선 로봇 산업의 고도화와 함께 관절 단위의 정밀 제어 기술이 핵심 경쟁력으로 부상하며, 고해상도 엔코더에 대한 수요가 빠르게 증가하고 있다. 특히 휴머노이드 로봇에 대한 관심도 증가와 협동로봇의 확산으로 제한된 공간 내에서
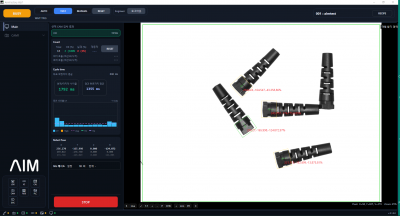
사진. 에이아이엠 자동화 솔루션 기업 에이아이엠(이하 AIM)이 로봇과 비전을 하나의 플랫폼으로 통합한 신규 소프트웨어 ‘AIMFactoryCore’를 앞세워 제조 자동화 시장 공략에 나선다. 기존 비전 중심 시스템에서 한 단계 확장된 구조를 통해


하비스탕스(주) 임승재 대표이사 / 사진. 하비스탕스(주) 하비스탕스(주)는 적층제조 기술을 기반으로 맞춤형 로봇 그리퍼 서비스 그립팜(GriPalm)을 제안하며 로봇 자동화 시장에서 경쟁력을 확대하고 있다. 동사는 씨메스로보틱스(주) 적용 사례를 통해 경량 EOAT(
생성형 AI와 휴머노이드가 산업계의 화두로 떠오르면서 제조 현장에서도 AI 활용 방안에 대한 관심이 높아지고 있다. 그러나 실제 공장에서는 화려한 기술보다 안정성과 생산성이 우선된다. (주)티로보틱스는 반도체 공정용 로봇으로 축적한 기술력을 기반으로 모바일 로봇과 피지






