
<사진. KISTI 미리안 사진자료
출처. KISTI 미리안 『글로벌동향브리핑』>
밀수품 탐지를 위해 선박의 선체를 조사하는 잠수 로봇
밀수품이 숨겨진 빈 구획을 찾기 위하여 선박의 선체를 조사할 수 있는 미식 축구공보다 작은 크기의 잠수 로봇이 미국 매사추세츠 공대(MIT) 연구자들에게 의하여 개발되었다.
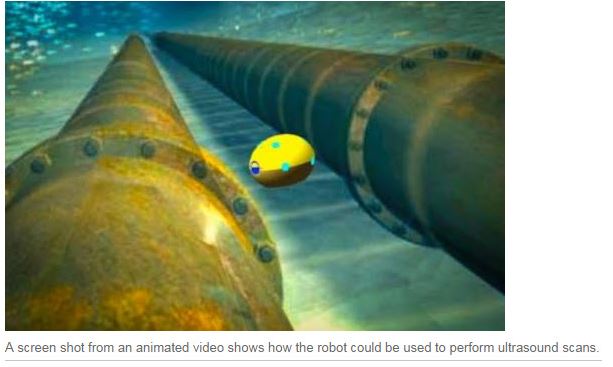
2014년 9월 14일~18일 사이에 열린 지능형 로봇 관련 국제 학술회의(명칭: International Conference on Intelligent Robots and Systems)에서 미국 매사추세츠 공대(MIT) 연구자들은 초음파 스캔을 수행하기 위하여 물속의 표면을 따라 미끄러질 수 있도록 평평한 패널을 가지는, 미식 축구공보다 더 작은 크기의 타원형 잠수 로봇을 공개하였다. 이 잠수 로봇은 원래 원자로의 물탱크에서 균열을 찾기 위하여 설계되었으며, 밀수업자들이 종종 밀수품을 숨기기 위하여 사용하는 가짜의 선체나 프로펠러축을 가진 선박을 조사하는 데에 사용될 수 있다.
잠수 로봇은 작은 크기와 독특한 추진 메커니즘을 가지므로 눈으로 볼 수 있는 후류를 남기지 않는다. 잠수 로봇은 이론적으로 조류(藻類: 물속에 사는 하등 식물의 한 무리) 무더기 또는 다른 위장 속에서 숨겨질 수 있다. 잠수 로봇의 함대는 밀수업자에게 노출되어 자신의 짐을 폐기할 기회를 주지 않은 채로 항구에 있는 선박으로 떼를 지어 이동할 수도 있을 것이다.
"항구의 보안담당 기관이 항구로 들어오는 모든 소형 보트를 검사하기 위하여 전통적인 로봇을 사용하면 매우 많은 비용이 소요된다. 만약 개별 로봇이 예를 들어 600달러 정도로 충분히 저렴하다면 20개 정도의 개별 로봇을 협력하여 활용하지 않을 이유가 없다. 만약 하나의 로봇이 파손된다고 하더라도 만드는 것이 쉽기 때문에 큰 일이 아니다"라고 지도 교수인 해리 아사다(Harry Asada)와 함께 잠수 로봇을 설계한 기계공학과 대학원생인 샘프리티 바타차리아(Sampriti Bhattacharyya)가 말했다.
사실 샘프리티 바타차리아는 해리 아사다 교수의 연구실에서 3차원 인쇄기를 이용하여 잠수 로봇의 주요 구성 요소를 제작하였다. 잠수 로봇의 절반은 평평한 패널을 가지며, 방수 기능을 갖춘 전자부품을 보유하고 있다. 잠수 로봇의 다른 절반은 침투성이며, 고무관을 통하여 물을 배출하는 6개의 펌프로 구성된 추진 시스템을 갖추고 있다. 6개의 고무관 가운데 2개는 평평한 패널의 반대쪽에 있는 로봇의 측면으로 물을 배출하여 잠수 로봇이 검사하는 어떠한 표면에서도 압력을 인가하여 접촉을 유지하도록 한다. 다른 4개의 고무관은 쌍으로 로봇의 장축(long axis) 양단으로 물을 배출하여 그 이동을 제어한다.
[불안정성의 이용]
잠수 로봇이 가진 타원형의 형상은 본질적으로 설계상 불안정하다고 샘프리티 바타차리아가 설명하였다. "이러한 형상은 불안정하게 만들어져서 쉽게 제어할 수 있는 전투기와 매우 유사하다. 만약 일단에 있는 2개의 고무관이 물을 배출하도록 작동하면 잠수 로봇은 직진하지 않고 단지 회전할 것"이라고 샘프리티 바타차리아가 말했다.
이렇게 회전하려는 경향은 좁은 공간에서 작동시키려고 할 때는 자산이 되지만, 선박의 선체를 스캔하면서 직선으로 움직이려고 할 때는 골칫거리가 된다. 그래서 모든 고무관은 다른 각도에서 물을 배출하며, 샘프리티 바타차리아는 로봇의 불안정성에 대한 가장 큰 제어 능력을 제공하기 위하여 이 각도를 계산하였다.
잠수 로봇의 방수된 체임버(chamber:실(室). 좁은 공간)에는 제어 회로, 배터리, 통신 안테나, 3개의 가속도계와 3개의 자이로스코프로 구성되어 로봇이 어느 방향으로 가더라도 그 운동을 측정하는 관성 측정 장치 등을 구비한다. 제어 알고리즘은 로봇이 경로 상에 있도록 6개의 고무관 각각을 통하여 물이 배출되는 속도를 지속적으로 조절한다.
초기 실험에서 연구자들은 로봇이 직선으로 이동하는 동안 물속의 표면으로 이동하고 그 표면과 접촉을 유지하는 능력만을 시험하였다. 그래서 시작품은 아직 초음파 센서가 부착되지 않았다.
이 시작품에 사용된 충전 가능한 리튬 배터리는 약 40분 동안 지속된다고 샘프리티 바타차리아가 말했다. 잠수 로봇은 표면에 부착되었을 때 초당 0.5~1미터의 속도로 이동할 수 있기 때문에 충전하기 전에 소형 선박 여러 대를 검사할 충분한 시간을 제공한다.
연구자들은 여러 잠수 로봇으로 구성된 함대가 일부는 충전을 위하여 항구로 복귀하고 나머지는 임무를 수행하러 가면서 윤번제를 유지하는 것을 상상하고 있다.
다음의 시작품은 무선으로 충전할 수 있는 배터리를 특징으로 할 것이며, 추진 시스템의 변경은 잠수 로봇의 작동 시간을 한 번의 충전으로 최대 100분까지 늘릴 것이라고 샘프리티 바타차리아가 말했다.
[물체와의 거리 유지]
연구자들은 부드러운 표면을 따라 이동하는 잠수 로봇의 능력을 시연하였지만, 많은 선박의 선체들은 외피가 형성되어 연속적인 접촉을 방해할 수 있다. 그러나 초음파는 발신기가 직접적으로 스캔하고자 하는 물체와 접촉하고 있을 때, 또는 그 거리가 음파 파장의 특정한 배수가 되었을 때만 작동한다.
이렇게 정밀한 거리를 유지하는 것은 무리한 요구이지만, 샘프리티 바타차리아와 해리 아사다 교수는 진행 중인 연구로 로봇이 표면 접촉을 하지 않고 초음파 스캔을 수행할 수 있도록 정확한 깊이를 가지는 유체역학적 완충물을 만드는 기계 시스템을 탐색하고 있다.
미국 공군의 특수전술 장교인 나단 베처(Nathan Betcher)는 샘프리티 바타차리아와 해리 아사다 교수의 연구를 긴밀하게 지켜보고 있다. "이러한 종류의 기술이 내가 미래에 담당할 수도 있는 수많은 임무나 역할에 상당한 영향을 줄 수 있는지를 관찰하는 데에 큰 관심을 가지고 있다"고 나단 베처가 말했다. "이러한 종류의 기술이 밀수된 핵무기 물질, 생물학 작용제, 화학 작용제 등에 대한 탐지에서부터 마약 차단, 물속에 잠긴 구조 및 선체에서 응력 파손의 발견, 심지어 해양 교통의 더 빠른 처리와 이송에 이르기까지 국내의 해양 작전에서 사용될 수 있는지를 관찰하는 데에 나는 특히 관심이 있다"고 나단 베처가 덧붙였다.
■ KISTI 미리안 『글로벌동향브리핑』 http://mirian.kisti.re.kr






