한양대 ERICA, ‘K-디지털 트레이닝’ 교육과정 개강
'AI기반 공정자동화 로봇전문가 양성과정' 현장 / 사진. 한양대 ERICA 지능형로봇사업단 한양대학교 ERICA 지능형로봇사업단은 지난 8월 18일(금) 청년 구직자를 대상으로 K-디지털 트레이닝 1기‘AI기반 공정자동화 로봇전문가 양성과정&

“로봇 검사 시스템의 좋은 선례 되도록 R&D에 앞장설 것”

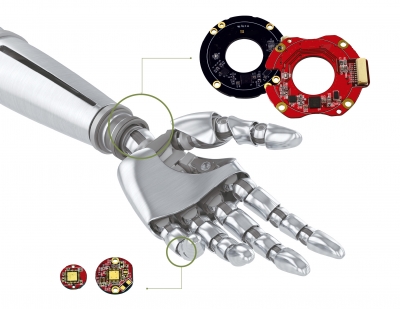
삭도시설의 원격 능동 검사 로봇 체계 개념도(사진 한국로봇융합연구원)
한국로봇융합연구원(KIRO, 이하 연구원)이 산업통상자원부(이하 산업부)가 추진하는 ‘와이어 로프, 삭륜 장치를 포함한 삭도시설 원격 검사 로봇 시스템 개발 사업’을 수행한다고 밝혔다.
이번 사업이 시작되면 산업부, 경상북도, 포항시의 지원으로 4년간 총 사업비 55억 원(산업부 50억, 경상북도·포항시 5억)이 투입된다.
이번 개발 사업은 와이어로프, 삭륜 장치에 대해 인공지능 기반 영상 및 비파괴 검사 기술을 적용해 실시간 안전성 확인을 위한 원격 능동 제어 기반 삭도시설 검사 로봇 시스템 개발을 목표로 한다.
연구원은 약 1년 전부터 경상북도의 선제적 지원을 받아 한국교통안전공단과 현장 조사를 통해 삭도 시설 검사 로봇 기술개발을 준비해 왔으며, 한국시설안전연구원, 한국원자력연구원, 로보아이, 한국교통안전공단이 이번 연구에 참여한다.
한편 연구원은 산·학·연 공동연구개발을 통해 로봇기술을 활용해 삭도 시설 와이어로프 내/외선 및 삭륜을 점검하고 첨단 센서를 활용해 원격으로 모니터링 할 수 있는 시스템을 개발할 뿐만 아니라 국내 유일 삭도 검사 전문 기관인 한국교통안전공단의 검사 기술과 연계해 개발 기술을 검증하고 상용화될 수 있도록 추진할 계획이다.
여준구 연구원장은 “사회 기반 시설물의 안전사고를 예방하기 위해서는 육안이 아닌 영상 및 MRT기반 비파괴 검사 모듈 기술개발이 필요하다. 삭도 시설 점검을 위한 와이어로프 주행 로봇 기술은 세계 최초로 개발을 시도하는 만큼, 개발된 기술이 향후 교량, 케이블 적용 시설(항만 크레인, 건설 크레인 등)과 같이 사람이 직접 검사하기 어려운 인프라 시설에 적용되기를 기대하며, 안전 검사 분야의 로봇 검사 시스템에 대한 좋은 표본이 될 수 있도록 연구에 최선을 다하겠다”라고 밝혔다.
'AI기반 공정자동화 로봇전문가 양성과정' 현장 / 사진. 한양대 ERICA 지능형로봇사업단 한양대학교 ERICA 지능형로봇사업단은 지난 8월 18일(금) 청년 구직자를 대상으로 K-디지털 트레이닝 1기‘AI기반 공정자동화 로봇전문가 양성과정&

한국로봇산업협회가 서비스로봇 실증-환경구축 최종 분석 보고서 공유 세미나에 참여한다(사진. 한국로봇산업협회). 한국로봇산업협회(KAR, 이하 협회)가 오는 12월 7일(수) 부여 롯데리조트에서 개최되는 서비스로봇 실증-환경구축 최종 분석 보고서 공유 세미나에 참여한다.

한국로봇융합연구원 선임본부가 RoMeLa와의 로봇 R&D를 위한 협약을 체결했다(사진. 한국로봇융합연구원). 한국로봇융합연구원(KIRO, 이하 연구원) 선임연구본부가 UCLA의 로봇 석학 Dennis Hong 교수의 Robotics and Mechanisms L

(사진. 한국로봇융합연구원) 한국로봇융합연구원(KIRO, 이하 연구원)이 지난 11월 3일(목) 2022 해양레저 장비산업 전략 세미나를 KIRO안전로봇실증센터(포항 북구)에서 개최했다. 이번 세미나는 연구원이 주관하는 해양레저안전장비 및 안전기술개발 사업의 일환으로


클린룸 환경은 반도체, 디스플레이, 이차전지 산업의 품질 경쟁력을 결정하는 핵심 요소다. 생산 장비의 고속화가 진행되면서 케이블 보호 부품에서도 분진과 소음 저감 기술의 중요성이 높아지고 있다. 이에 씨피시스템(주)이 케이블체인과 전선관 분야의 국산화 기술을 바탕으로

제조 자동화의 무게중심이 ‘엔지니어링’에서 ‘로보틱스’로 빠르게 이동하고 있다. 로보틱스라는 용어는 이제 설비의 한 구성요소를 넘어 공장 자동화를 위한 보다 포괄적인 의미를 담고 있다. 이 같은 상황에서 아비만로보틱스(주)는