
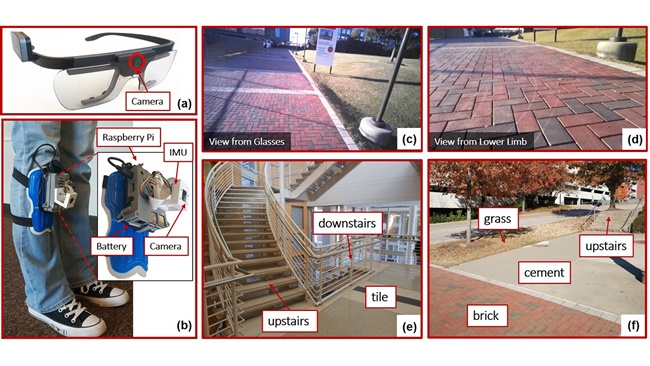
이미징 장치는 로봇 보철에 대한 환경적 맥락을 제공한다. (사진. NC STATE)
노스캐롤라이나 주 주립대학(NC STATE) 연구원들은 로봇 인공 보철물 또는 외골격을 사용하는 사람들이 다른 유형의 지형에서보다 안전하고 자연스럽게 걸을 수 있도록 기존 하드웨어와 통합 가능한 새로운 소프트웨어를 개발했다. 새로운 프레임 워크는 컴퓨터 비전을 보철 다리 제어에 통합하고 소프트웨어가 불확실성을 더 잘 설명할 수 있는 강력한 인공지능(AI) 알고리즘을 포함한다.
연구 관계자는 “하단 로봇 보철은 사용자가 걷고 있는 지형에 따라 다른 행동을 수행해야 한다”라며, “우리가 만든 프레임 워크는 로봇 보철의 AI가 사용자가 밟을 지형 유형을 예측하고, 그 예측과 관련된 불확실성을 정량화한 다음, 불확실성을 의사 결정에 통합 할 수 있도록 하는 것”이라고 밝혔다.
연구진은 로봇 보철의 행동을 조정해야하는 6 가지 지형(타일, 벽돌, 콘크리트, 잔디, 위층 및 아래층)을 구분하는 데 중점을 뒀다.
새로운 프레임 워크는 하드웨어 및 소프트웨어 요소를 모두 통합한다. 연구원들은 팔다리가 적은 로봇 외골격 또는 로봇 보철 장치와 함께 사용할 수 있는 프레임 워크를 설계했지만 하나의 추가 하드웨어인 카메라를 사용했다. 실제로 연구에서 안경에 착용된 카메라와 팔다리 보철물 자체에 장착된 카메라를 사용, AI가 두 가지 유형의 카메라에서 컴퓨터 비전 데이터를 개별적으로 또는 함께 사용할 때 어떻게 활용할 수 있는지를 평가했다.
연구진은 “웨어러블 로봇 공학을 위한 제어 소프트웨어에 컴퓨터 비전을 통합하는 것은 신선한 연구 분야”라며, “우리는 시스템이 의사 결정에 불확실성을 통합 할 수 있는 방식으로 불확실성을 평가하고 정량화하는 방법을 딥러닝 시스템에 가르치는 더 좋은 방법을 찾았다”고 밝혔다. 이어 “이것은 확실히 로봇 보철과 관련이 있지만 여기서 우리의 작업은 모든 유형의 딥 러닝 시스템에 적용될 수 있다”고도 전했다.
연구진들은 AI 시스템을 훈련시키기 위해 카메라를 신체와 신체를 연결한 개인과 연결, 다양한 실내 및 실외 환경을 살펴봤다. 이후 팔다리 절단이 낮은 사람이 카메라를 착용하고 동일한 환경을 통과하도록 해 개념 증명 평가를 수행했다.








