
휴머노이드 로봇의 정의와 기원
‘상상 그 이상’의 상징성으로 전 세계가 주목하는 Humanoid Robot
지난 6월 8일, 반도체 전문기업 프리스케일이 광운대학교와 휴머노이드 로봇 개발에 대한 업무 협약을 체결했다. 이에 따라 광운대학교는 프리스케일 반도체 기술이 적용된 사람 크기의 휴머노이드 로봇 ‘프랭키(Frankie)’를 개발할 예정이다. 휴머노이드 로봇이 상업성을 확보하기에는 아직 미흡한 점이 많다는 전문가들의 견해에도, 휴머노이드 로봇에 대한 관심과 열의는 식지 않고 더욱 뜨거워지고 있는 것이다. 본지는 전 세계의 관심, 휴머노이드 로봇의 정의와 기원을 통해 이 로봇이 갖는 상징성을 알아보고자 한다.

Intro 혼다는 왜 아시모에 집중하는가
일본 혼다(Honda)가 2011년에 휴머노이드 로봇 ‘아시모(ASIMO)’ 신형을 공개했다. 2007년 이후 4년 만의 개량형으로 첫 선을 보인 것이다. 이 차기 아시모는 더욱 진화해 손으로 병뚜껑을 돌려 열 수 있고, 한발로 껑충껑충 뛰며, 손가락으로 승리의 V자 포즈까지 취할 정도로 기능과 지능을 한 단계 업그레이드시켰다.
자동차 전문회사 혼다가 2000년에 아시모를 처음 발표하고 난 후, 10년이 넘은 지금까지도 더욱 인간다운 로봇을 만들기 위해 이처럼 혼신의 힘을 다하는 이유는 무엇일까.
아시모는 혼다의 지속적인 투자와 연구개발을 통해 축적된 기술력의 집대성이다. 이러한 상징성이 부각되면서 혼다는 휴머노이드 로봇으로 기업 이미지 제고에 큰 성과를 올렸다. 이제는 혼다 하면 아시모가 떠오를 정도로 아시모는 혼다의 마스코트가 되어 버린 것이다.
일각에서는 아시모가 상업적으로 성공했다고 보기에는 아직 미흡한 점이 많다고 주장한다. 하지만 혼다는 이에 아랑곳하지 않고 지속적으로 로봇을 업그레이드하며 기술의 우수성을 뽐내고 있다.
Define Human Android=Humanoid
휴머노이드(Humanoid) 로봇은 휴먼(Human)과 안드로이드(Android)가 합쳐진 말로, 인간의 신체와 유사한 모습을 갖춘 로봇을 가리킨다.
일반 대중들이 상상하는 로봇의 궁극적인 형태는 인간을 닮고 인간의 행위를 모방할 수 있으며 인간의 지적능력을 갖춘 로봇이다. 따라서 이러한 모습의 로봇을 현실에서 구현한 것이 바로 휴머노이드 로봇이고, 이는 많은 사람의 마음속에 자리 잡고 있는 환상 속의 안드로이드(인조인간)나 사이보그(Cyborg: 인공장기와 생체가 결합된 인간)를 연상케 해 대중적 관심을 자아내고 있다.
Origin Automata가 휴머노이드 로봇의 조상?
6세기 이후 18세기에 이르기까지 사람과 동물모양으로 만든 자동인형이 원시적인 인간형 로봇의 출발로 보는 사람이 많다. 이 자동인형은 ‘어떤 이의 의지에 의해 움직이는 인형’이란 의미를 가진 그리스어에서 유래한 오토마통(Automaton) 또는 오토마타(Automata)라 불렸다. 이는 전기 발명 이전에 기계적인 힘으로만 움직이는 인형이다. 태엽을 감아 태엽이 풀리는 힘을 이용하는 시계의 원리와 유사하지만 훨씬 더 복잡하다.
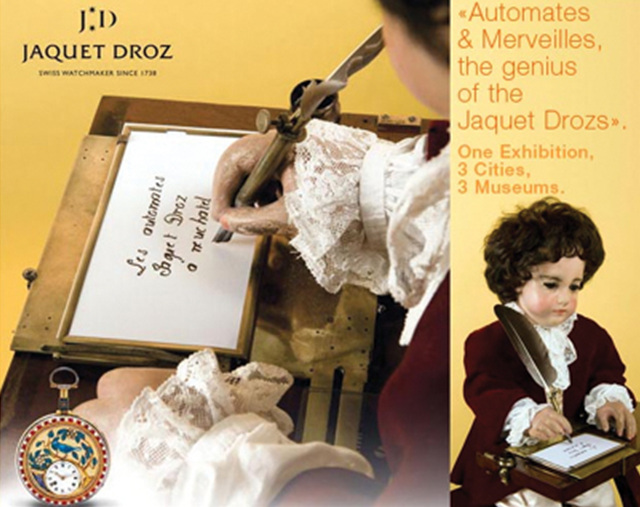
대표적인 자동인형 제작자로 1739년 프랑스의 엔지니어 자크 드 보캉송(Jacques de Vaucanson)을 꼽을 수 있다. 그리고 스와치그룹의 시계 브랜드 자케 드로의 창업자, 피에르 자케 드로(Pierre Jaquet Droz)와 그의 아들 앙리-루이 자케 드로(Henri-Louis Jaquet Droz), 입양한 아들 장-프레데릭 레쇼(Jean-Frederic Leschot)가 만든 3개의 자동인형도 유명하다. 이들은 1768년부터 1774년 사이 ‘피아노 치는 음악가(Musician)’ ‘그림 그리는 도안가(Draughtsman)’ ‘글씨 쓰는 작가(Writer)’를 만들었다.
1893년에는 조지 모아가 시속 14킬로미터의 속도로 원을 그리며 걷는 증기인간을 제작했는데, 이것이 사실상 인간형 로봇의 시작이라고 보는 견해가 있다. 그 후 수학과 컴퓨터의 발견, 그리고 기계공학의 발전에 따라 휴머노이드 로봇의 진화가 계속되었다.
|
일각에서는 전기 발명 이전에 기계적인 힘으로만 움직이는 인형인 ‘오토마타(Automata)’를 휴머노이드 로봇의 시초로 보고 있다. 사진은 스와치그룹이 제작한 3종류의 오토마타. |
|
|
|
|
|




History 위대한 로봇 탄생, 휴머노이드 로봇
과학자들은 현대적 의미의 로봇기술이 확립된 1960년대부터 산업용 로봇의 출현과 함께 인간의 모습과 흡사한 모습의 로봇을 계속 꿈꾸어 왔다. 하지만 1970년대부터 로봇이 산업용 로봇이라는 이름으로 대량생산을 위한 도구로 사용되면서 로봇은 단순히 매니퓰레이터(Manipulator)로서 개념이 국한되었다.
그러나 선진국 등에서 보다 빠른 컴퓨터 칩 등의 등장에 힘입어 여러 연구자들에 의하여 휴머노이드 로봇에 관한 연구가 끊이지 않게 되었고, 그 결과 1990년대 중반 이후 여러 종류의 휴머노이드 로봇이 개발되어 대중매체에 소개되기 시작했다.
개발 초기에 휴머노이드 로봇이 인간의 어떤 부분을 닮게 할 것인지에 대해서는 여러 가지 이견들이 있었다. 왜냐하면 인간처럼 안정된 걸음은 물론, 시각, 청각, 촉각, 후각, 미각 등 오감 및 뛰어난 수준의 인공지능, 그리고 인간과 적절한 수준의 감정적, 지적 교류 등의 모든 기능을 갖추기란 기술적으로 한계가 있었기 때문이다.
따라서 초기에는 휴머노이드 로봇의 가장 대표적인 특징이라 할 수 있는 ‘직립 2족 보행’에 대한 개발이 중점적으로 이루어졌다.
* 휴머노이드 로봇의 미션, 두 발로 걸어라!
인류 최초의 2족 보행 로봇은 일본에서 탄생했다. 이 로봇은 일본 와세대 대학 가토 이치로 교수팀이 처음 만들어냈다.
1973년, 두 다리로 천천히 걸을 수 있고 일본어 발음이 가능한 최초의 인간형 로봇, ‘와보트(WABOT) 1호’가 만들어진 것이 계기가 되어 로봇이 인간생활 속으로 깊숙이 들어왔다. 와보트는 와세대 대학에서 만든 로봇이라는 뜻이다.
당시 와보트 1호는 1보(15cm)를 걷는 데 45초가 걸렸다. 두 발로 보행은 가능했으나 아주 느리게 몇 걸음 걷는 수준이었다. 와보트 1호는 팔과 다리, 인공 눈과 입을 가졌기 때문에 두 발로 걷거나 사물을 인식할 수 있었으며 미리 입력되어 있는 간단한 질문에 대답할 수 있었다.
1984년에는 와보트 2호가 개발됐다. 와보트 2호는 파이프 오르간 연주용으로 제작됐으며, 악보를 읽고 페달을 밟으며 피아노 건반을 칠 수 있었다. 11년 전 개발된 1호보다 지능적인 면에서 한 차원 업그레이드 된 셈이다.
사실 와보트 개발 역사의 원점은 1951년 탄생한 만화영화 주인공 ‘우주소년 아톰’에 있다고 해도 과언이 아니다. 다른 어느 나라보다 일본의 로봇 과학자들은 아톰을 꿈에 그리며 인간의 마음을 가진 로봇을 만들고 싶다는 일념으로 연구에 매달려 왔다. 일본 과학자들의 최종 목표는 아톰처럼 사람의 마음과 감정을 지니고 스스로 생각하는 능력을 갖춘 로봇을 만드는 것이다.
일본 과학자들이 아톰 영화를 보며 자라서인지 그들은 세계 최초로 인간처럼 2족 보행을 하는 로봇을 개발했고, 세계적인 휴머노이드 로봇 ‘아시모’를 탄생시켰다. 현재 일본의 인간형 로봇 개발 열기는 세계 어느 나라보다 뜨겁다.
전 세계 로봇 과학자들은 일본 과학자들의 와보트 1호 개발이 현대 휴머노이드의 역사의 시작을 알리는, 역사적으로 중요한 사건이라고 평가하고 있다.
|
|
|
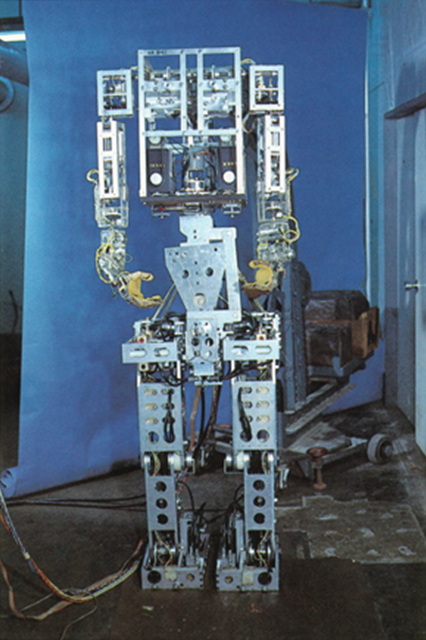
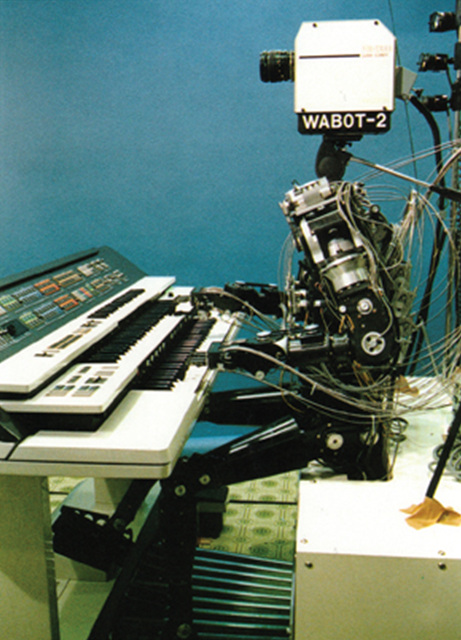
인류 최초의 2족 보행 로봇 ‘WABOT 1호(左)’와 파이프 오르간 연주용으로 제작된 ‘WABOT 2호(右)’
* 핵심적인 로봇기술로 더욱 인간다워지고 있는 휴머노이드 로봇
휴머노이드 로봇에 대한 연구는 앞서 언급한 2족 보행을 위한 메커니즘 외에도 인간과 더욱 닮아 보이게 하는 기술들이 끊임없이 개발됐다.
그 중의 하나가 로봇의 손(Hand)이다. 세계적으로 많은 연구자들이 인간의 손처럼 물체를 감지하고 동시에 유연하게 조작 가능한 다양한 형태와 기능의 로봇 손을 개발했으며, 현재에도 계속 새로운 연구를 활발하게 진행 중이다.
최근에 개발된 로봇 손을 보면 인간형 로봇 손의 개발을 목표로 손가락 형태나 기능면에서 인간의 손과 매우 흡사하게 개발되는 추세를 보이고 있다. 아시모 같은 경우에도 초기 모델에는 손가락이 3개였는데, 현재는 다섯 개의 손가락과 손바닥에 촉각센서와 힘 센서가 채용돼 있어 사람처럼 각각의 손가락을 독립적으로 움직일 수 있다. 덕분에 쇼핑카트를 밀고, 악수를 하며 음료수가 담긴 쟁반을 옮길 수 있었던 기존 수준에서 더 나아가 병뚜껑을 열고 종이컵에 음료수를 따르는 일까지 척척 해낸다. 하지만 인간의 손과 같은 기능을 가진 작은 로봇 손의 개발은 현재 아직도 어려운 기술 중의 하나로 자리 잡고 있다.
이 밖에도 휴머노이드 로봇은 양팔에 대한 연구, 비전·음성 인식 등 센서기반 인공지능에 관한 개발 등 더욱 인간답게 보이게 하는 핵심적인 기술들이 적용되었고, 광범위한 분야에서 매우 다양한 방식과 접근으로 개발이 이루어지고 있다.
이처럼 휴머노이드 로봇은 당대 로봇 관련 모든 기술의 집합체일 뿐 아니라 기술력의 상징이다. 따라서 휴머노이드 로봇이 가지고 있는 기술적, 사회문화적 상징성으로 전 세계가 이 로봇에 주목하고 있는 것으로 풀이되고 있다.

- 참 고 -
한국기계연구원 현대 휴머노이드 역사의 시작
KAIST 휴머노이드 로봇의 현황과 발전 방향 (오준호 박사)







