로봇의 인지발달모델 구축
대인적 공창(共創)지능 연구
보다 높은 수준의 인공지능 로봇을 개발하기 위한 로봇의 인지발달 실험은 지금 이 시간에도 꾸준히 진행되고 있으며, 자궁 내 환경 및 신생아 시뮬레이터와 전신감각 운동학습용 인지발달 휴머노이드 로봇 Noby는 이러한 연구의 일환으로 개발됐다. 이 플랫폼들이 대인적 공창 지능 연구의 핵심 키워드가 될 수 있을지 그 귀추가 주목되고 있다.
|
|
|
|
|


1. 서론
대인적 공창지능(對人的 共創知能)은 신체적 행동에서 대인 커뮤니케이션까지를 발전적으로 연결하는 인지모델의 로봇 구성론을 의미한다. 또한 JST ERATO에서 Asada 공창지능시스템 프로젝트의 신체적 공창지능(身體的 共創知能)과 사회적 공창지능(社會的 共創知能) 사이에 공창지능기구(共創知能機構)의 지식을 가미하여 연결하는 것으로 계획되었다.
본 연구는 인간의 태아에서 영유아에 이르기까지 자율학습과 로봇의 구성론을 통해서 태동에서부터 사회성 인지기반까지의 인지발달모델을 구축하였으며 발달과정은 (1)태동의 발생과 분화 (2)신체도식의 획득과 신생아모방 (3)행동의 분화와 핸드 리가드 발생 (4)환경탐색과 물체개념 획득 (5)모방의 발생과 발달 (6)도구사용 능력의 획득 (7)다른 사람과의 상호작용의 발달에 대해서 공통적 이론기반인 신체성 인지과학을 바탕으로 상호 간을 강하게 연관시켜 연구를 실시하였다.
인지발달 실험의 공통플랫폼으로써 태아·신생아 발달시뮬레이션 및 발달실험용 영유아형 로봇을 구축하였다. 그 중 하나는 태아·신생아의 전신근골격계, 감각기, 뇌신경계를 모델화한 자궁 내 환경 및 신생아 시뮬레이터이고 다른 하나는 전신감각 운동학습용 인지발달 휴머노이드 Noby(생후 9개월 정도)로 명명된 아기로봇이다.
2. 플랫폼의 개발
2-1. 태아·신생아 발달 시뮬레이터
태아는 자궁 내에서 활발히 운동하고 학습하면서 발달하고 있는 것으로 알려지고 있다. 사람의 인지발달의 기본원리를 해명하기 위해서는 태아기의 발달 모델을 구축할 필요가 있다. 신체성 인지의 관점에서 추진하기 위해서는 태아, 신생아기의 신체·신경계 및 환경 시뮬레이션 모델을 구축하고 그것들의 상호작용과 발달을 연구할 필요가 있다. 이를 위한 연구 플랫폼으로서 감각운동 기능을 구비한 태아·신생아 모델과 자궁 내 환경 모델을 개발하였다.
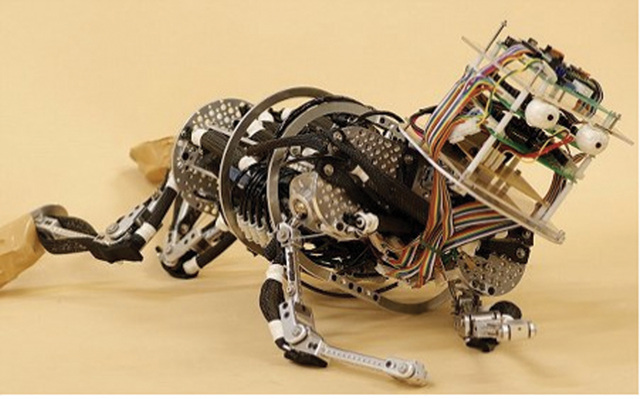
2-2. Noby : 9개월 된 아기 휴머노이드 로봇
Noby는 시각, 청각, 평형감각에 더해서 전신이 유연한 각 피부와 유아와 같은 환경과 인간과 상호작용 할 수 있는 관절을 갖는 것을 기본방침으로 하여, 9개월 된 아기의 평균 신장·체중 구현을 목표로 개발됐다. 생후 9개월은 인지 발달이 가속적으로 추진되는 시기이며 발달연구의 대상 시기로 중요하다.
Noby의 특징은 환경이나 다른 사람과의 상호작용에 적합한 길항건구동(拮抗腱驅動)과 분포형 촉각 센서를 심은 부드러운 전신 피복으로 되어 있고 두부는 안구 카메라, 청각마이크, 발성용 스피커, 자세 센서, 표면에 촉각 센서의 각종 장치가 있으며 안구운동, 입의 여닫기, 눈꺼풀의 개폐를 할 수 있는 구동계도 포함된다(신장 750㎜, 체중 9kg).
3. 태동에서 사회성인지에 이르는 발달의 모델화
3-1. 태아 운동발달과 신경계 자기 조직화
태아기의 운동발달에 대해서 척수연수계의 신경 진동자로 구동되는 신체운동(GM ; General Movement)이 생성되는 감각운동 정보를 반영한 신경계 결합의 자기 조직화와 행동의 분화라는 관점에서 연구를 실행하였다.
태아 초기의 운동발달은 16종으로 분류되고 있다. 태아의 대뇌는 고차의 뇌 영역이 척수계에 접속하는데 걸리는 시간은 빨라도 16주 이후이며, 이 시기의 태생 초기 운동은 척수연수 등의 저차 운동계에 의해서 구동된다. 또 자궁 내에서 감각 경험은 촉각이 지배적이기 때문에 촉각세포 분포가 다른 신체 모델을 준비하여 비교 실험을 시행하였다.
3-2. 신체 감각의 구조에 따르게 되는 행동분화
태동 발달에서 본 바와 같이 미분화의 신체 운동, 즉 GM에서 4지 독립운동이나 손으로 얼굴을 만지는 운동으로의 분화는 신체 및 촉각 분포의 구조에 따른다고 생각한다. 생후 3개월 된 아기는 가끔 자신의 손을 눈앞에 멈추거나 이따금 여러 움직임을 하면서 빤히 보는 행동을 보이는데 이를 핸드 리가드라고 한다. 이 핸드 리가드를 감가운동학습의 결과를 창발하는 가능성을 생각해서 발달 모델로 구성, 실현하였다.
3-3. 자기 접촉학습에 기초한 자기 얼굴표상 획득
탄생한 직후에 다른 사람 얼굴표정이나 손의 단순 동작을 흉내내는 신생아의 모방은 신생아가 다른 사람과 자기의 신체운동을 시각을 통해서 대응하는 원시적인 구조를 가지고 있음을 나타내고 있다. 이것이 태아기의 감각운동 학습에 의해 획득되는 것으로 생각하여 이 모델을 제안하게 되었다.
3-4. 밀러 뉴론(Mirror Neuron)의 획득 : 물체 조작모방의 기반
밀러 뉴론 시스템은 사람이나 원숭이의 뇌가 자기와 다른 사람(물체 지향)의 행위를 동일시하는 메커니즘을 말하는 것으로, 모방, 공감, 커뮤니케이션 등의 중요한 기반이라 생각된다. 이것도 감각운동학습의 결과 획득에 도움이 된다고 생각해 모델을 구축하였다. 생체에 가까운 스파이커 형 뉴론(Spiking Neurons)의 네트워크를 구성하여 시각과 촉각의 정보를 입출력하여 STDP에 의한 결합화증의 학습을 실행하였다.
3-5. 물체 어포던스의 탐색학습
유아는 물체를 쥐거나, 누르거나, 두들기거나, 핥거나, 던지는 등의 행위와 이를 통한 결과를 봄으로 인해 물체 어포던스를 발견하고 물체의 개념을 획득·재이용한다고 생각하고 있다. 이러한 물체지향 동작의 획득과정을 모델화하여 Noby를 이용하여 실험하였다.
3-6. 신체 도식적응에 기초한 도구 사용
도구사용 능력은 신체성과 고차인지를 연결하는 주요한 위치에 있으며, 그 기반은 도구가 되는 물체의 운동·기능을 자기 신체의 운동·기능에 연관시키는 능력에 있다. 일본 원숭이의 대뇌두정간구에는 손의 체성감각자격과 시각적 주시 등의 복수에 반응하는 바이모탈 뉴론이 있다.
3-7 음성·동작을 통한 주고받는 것의 발달 : 커뮤니케이션의 기반
유아와 양육자 사이에 상호 음성 모방을 통한 발화의 발달은 언어획득을 향한 사회성 인지발달의 중요한 요소이며 이를 구성론적으로 연구하기 위해서 사람의 성도, 입술을 모방한 발화 로봇을 제작하여 로봇과 사람의 상호 발음 모방을 실현하고 발화의 초기 발달 모델을 구축하였다. 상호 발음을 반복함으로써 유아의 발음이 양육자의발음에 접근하는 것은 양육자가 유아의 발음을 모방할 때 자기의 음성지각 카테고리와 발음 운동 카테고리를 통해서 유아의 발음을 유도하는 효과 때문이다.
4. 결론
지금까지 연구결과로 태아에서 유아기 전반(언어 획득 이전)까지의 발달의 주된 양상과 신체성을 공통기반으로 남은 문제 가운데 가장 중요한 것은 발전과정을 하나의 시스템 상에서 완전히 연속적으로 실현하는 것이다. 본 프로젝트에서 개발한 태아·신생아 발달 시뮬레이터와 아기로봇 Noby는 플랫폼으로서 기능을 다 할 것으로 생각하고 있으며, 적절한 통합뇌신경계 발달 모델을 구축하여 태동에서부터 사회인지기반까지 자율적으로 발달·획득하는 시스템을 실현하는 것이다.