
로봇의 감성표현방법
도면에 대한 간단한 설명
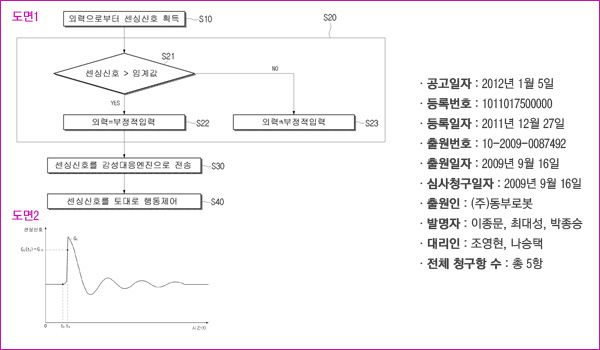
도면1 로봇의 감성표현방법 알고리즘 도면2 로봇에 인가되는 외력에 따라 획득된 시계열적인 센싱신호
기술 분야
본 발명은 로봇의 감성표현방법에 관한 것으로, 보다 상세하게는 외부로부터 로봇에 인가되는 외력을 감지하고, 인가된 외력변화를 시계열적인 센싱 신호로 획득하여 분석함으로써 로봇에 인가되는 외력이 부정적 입력인지 여부를 판단해 이에 상응하는 감성표현을 하도록 로봇을 제어하는 로봇의 감성표현방법에 관한 것이다.
발명의 실시를 위한 구체적인 내용
본 발명에 따른 애완용 로봇에는 가속도센서, FSR(Force Sensitive Resistor) 및 스트레인 게이지(Strain Gauge) 등의 각종 센서가 설치되어 있다. 여기서 각 센서들은 일정한 로봇의 보행 등과 같은 각종 제어동작시에 각각 로봇에 발생하는 연속적인 변화를 실시간으로 시계열적인 센싱신호로 획득하도록 설치된다. 만약, 애완용 로봇에 일정한 힘(이하 ‘외력’이라고 함, 예: 사용자의 때림, 누름 등)이 인가되면, 인가되는 외력의 시계열적인 변화는 로봇에 내장된 센서로부터 획득되는 시계열적인 센싱신호로 알 수 있다. 다시 말해, 가속도센서는 외력 인가시, 외력에 의한 로봇의 가속도 변화를 센싱하여 시계열적인 센싱신호로 획득하게 되는데, 획득된 센싱신호를 통해서 로봇 외부에서 로봇에 인가된 힘의 시계열적인 변화를 알 수 있다.
또한, FSR은 외력에 의한 압력변화를 센싱하여 시계열적인 센싱신호로 획득하게 되는데, 획득된 센싱신호로부터 FSR이 설치된 면적에 인가된 외력의 시계열적인 변화를 알 수 있다. 결과적으로, 센서로부터 획득된 시계열적인 센싱신호를 통해 외력의 시계열적인 변화를 알 수 있으므로, 획득된 시계열적인 센싱신호가 곧 외력의 시계열적인 변화를 나타낸다고 할 수 있다.
한편, 가속도센서는 3축(x축, y축, z축)으로부터 인지된 각 신호를 포함하므로 이를 토대로 중앙제어부에서는 외력으로부터 인가되는 힘의 방향성분도 인식해낼 수 있다. FSR이나 스트레인 게이지는 부착면에 인가되는 힘을 측정하기 때문에 센서의 부착 위치/각도에 의해서 외력으로부터 인가되는 힘의 방향성분을 알 수 있다. 애완용 로봇의 중앙제어부에는 인가된 힘이 부정적 입력인지 아닌지를 판단할 수 있는 기준값인 임계값이 기설정되어 저장될 수 있다. 아울러, 중앙제어부에는 위상지연 가중치를 설정변수로 하는 필터링 수식을 포함한 필터가 마련되어 상술한 바와 같은 시계열신호를 필터를 통해 출력신호로 출력하도록 구성될 수도 있다. 이 같은 임계값 설정과 필터의 구성은 중앙제어부에 적어도 어느 하나를 구성하는 것이 바람직하다.
본 발명에서의 필터는 이해를 도모하고자 가장 단순한 형태인 1차 저역통과필터 즉, 1차 필터링 수식이 내장된 필터를 후술할 실시예에서 나타냈으며, 필터의 성능향상 및 검출해야하는 부정적 입력의 검출도의 향상을 위해서 2차 또는 3차 등의 고차 저역통과필터 등의 다양한 필터를 마련할 수도 있다. 또한, 본 발명에 따른 애완용 로봇에는 감성대응엔진이 마련되어 상술한 바와 같은 센싱신호를 분석한 결과가 부정적 입력으로 판단되면, 감성대응엔진은 센싱신호를 토대로 기저장된 행동패턴에 따라 행동하도록 마련된다.
여기서, 감성대응엔진은 센싱신호의 방향성분을 토대로 일정한 방향성을 가진 행동을 구현하도록 마련될 수도 있다. 아울러, 본 발명에서의 부정적 입력이란, 일반적으로 애완용 로봇에 인가되는 힘 중 사용자의 감정상태가 부정적 상태에서 가해지는 ‘때림’ 또는 ‘강한 누름’ 등을 포함하는 사용자의 물리적 타격으로 정의한다.
도면1을 참조하면, 본 발명의 제1실시예에 따른 로봇의 감성표현방법은 센싱단계(S10), 판단단계(S20), 전송단계(S30), 감성표현단계(S40)를 포함하여 구성된다. 최초, 애완용 로봇에 사용자 등에 의해 힘이 가해지면, 애완용 로봇에 설치된 각종 센서는 인가되는 외력을 실시간으로 센싱하여 시계열적인 센싱신호로 획득한다(S10).
이때, 획득되는 센싱신호는 상술한 바와 같이 가속도, 압력 또는 변형량 중 적어도 어느 하나의 시계열적인 변화를 나타낸다. 이후, 센싱신호를 분석하여 외력이 부정적 입력인지 아닌지를 판단하되(S20), 비교단계(S21)와 결정단계(S22)를 통해 판단한다. 즉, 센싱신호와 임계값을 비교하고(S21), 센싱신호가 임계값을 초과하면 외력을 부정적 입력으로 결정한다(S22). 여기서, 임계값은 상술한 바와 같이 사전에 로봇에 저장되어 있는 값이다. 만약, 센싱신호가 사전에 로봇에 저장된 임계값을 초과하지 않으면 부정적 입력이 아니라고 결정한다(S23). 이후, 판단단계(S20)를 통해 외력이 부정적 입력으로 판단되는 경우에만 중앙제어부는 센싱신호를 감성대응엔진으로 전송한다(S30). 이어, 감성대응엔진은 전송된 센싱신호를 토대로 일정한 행동을 하도록 제어한다(S40). 이때, 감성대응엔진은 센싱신호의 외력의 방향성분을 토대로 일정한 방향성을 갖는 행동을 하도록 제어할 수도 있다.
상술한 바와 같은 본 발명의 제1실시예에 따른 로봇의 감성표현방법을 구체적인 일례를 들어 설명한다.
먼저, 상술한 바와 같이 로봇에는 인가되는 힘이 부정적 입력인지를 판단하는 기준값인 임계값(Gth)이 저장되어 있음을 가정한다.
도면2는 로봇에 인가되는 외력에 따라 획득된 시계열적인 센싱신호이다. 센싱신호(G0)는 t0에서 외력이 인가되면 t0이후부터 급격히 상승한다. 이후, t1에서의 센싱신호(G0)는 임계값(Gth)과 일치하고, t1이후에 센싱신호(G0)는 임계값(Gth)을 초과하므로 인가된 외력을 부정적 입력으로 판단한다.
여기서, 센싱신호(G0)는 일반적으로 다수의 노이즈를 포함하므로, 보다 정확하게 임계값(Gth)과의 비교를 위해, 중앙제어부에 소정의 저역통과필터를 마련하고 이를 통해 노이즈를 억제한 후에 임계값(Gth)과 비교할 수도 있다. 이후, 인가된 외력이 부정적 입력으로 판단되면 감성대응엔진으로 센서로부터 획득된 센싱신호를 전송한다. 이어, 감성대응엔진은 전송된 센싱신호를 토대로 하여 로봇이 짖는 행동과 같은 일정한 행동을 하도록 구현할 수 있다. 아울러, 센싱신호의 방향성분을 토대로 로봇이 때리는 방향의 반대방향 또는 다른 방향으로 도망을 가는 등의 행동을 구현할 수도 있고, 인가된 외력의 방향으로 덤벼드는 행동을 하도록 제어할 수도 있다.
이와 같이 인가되는 외력의 변화가 실시간으로 내장된 센서를 통해 시계열적인 센싱신호로 획득되고, 획득되는 센싱신호를 분석하여 이를 토대로 로봇이 행동을 하도록 구현함으로써, 종래 센서로부터 입력되는 센서의 접촉시간에 따라 로봇의 행동을 구현하는 것과 달리 로봇과 더욱 상호 교감을 하는 듯한 느낌을 사용자가 느낄 수 있다.






