
견마로봇의 전력제어 및 최적 운용에 대한 연구
 Study on Power Control
Study on Power Control
and Optimal Management
for Dog-Horse Robot
인간이 해내기에 위험한 정찰과 감시/경계의 임무를 수행하기 위해 개발한 견마형 로봇은 무인자율화를 목표로 하는 민/군사용 로봇이다. 임무 수행을 위해 장기간 관리 밖의 상황에 노출될 수밖에 없는 특성을 가진 견마형 로봇에는 최적의 전력 운용을 위한 전력제어장치가 필수적으로 요구되며, 이는 모든 무인 기동차량 운영에도 공통적으로 해당된다. 본 지면에서는 국방과학기술연구원의 도움을 받아 견마형 로봇의 최적운영을 위한 전력제어 방식을 알아봤다.
1. 서 론
견마로봇은 감시경계를 주목적으로 개발되고 있는 민군겸용 다목적 로봇으로서 감시경계의 특성상 장시간의 무성경계 운용이 필수적으로 요구된다. 이러한 요구조건을 만족하기 위한 방법으로는 연료전지를 사용하거나, 운용시간을 충족할 수 있는 용량의 2차 전지(배터리)를 탑재하면 가능하다. 그렇지만 연료전지에 대한 연구는 전 세계적으로 활발히 이루어지고 있으나 아직 개발이 완료되어 적용할 수 있는 단계까지는 이르지 못하고 있으며, 2차 전지의 경우에도 아직은 로봇의 중량 요구조건을 충족시킬 정도로 에너지 밀도가 높지 않다.
따라서, 무성기동을 통한 스텔스 기능을 만족하고, 제한된 중량 조건에서 운용시간을 충족할 수 있는 전력제어 및 운용 방안에 대해 미국 등의 선진국에서는 80년대 초반부터 연구가 진행되어 왔다. 현재는 무인 기동차량의 운용 요구조건에 적합한 전력제어장치를 개발 중에 있으며, 미국의 FCS(Future Combat System) 차량에 적용하고 있다. 국내에서도 군사적 목적의 차량에 대한 연구를 시작하였으며 국방과학연구소에서 처음으로 무인차량인 견마로봇에 적합한 전력제어 및 운용 개념을 도입하였다.
공간 및 중량의 제약이 있는 상태에서 군사적 목적의 유/무인 차량이 다양한 임무 시나리오 기반의 운용시간을 만족하기 위해서는 통합 전력관리와 최적의 운용체계의 설계가 요하다. 또한, 화재 발생 위험성이 있는 고전압 배터리를 안전하게 운용하기 위해서는 여러 가지 요소들이 고려되어야 한다. 첫째, 임무의 유형에 따라 가변되는 부하의 특성에 따라 소요되는 전력을 최적으로 생성하는 것이 필요하다. 둘째, 임무장비를 탑재한 견마로봇은 주행시에만 전력의 소요가 필요할 뿐만 아니라 다양한 임무장비에도 전력이 소요되기 때문에 엔진/발전기에서 생성된 전력으로 로봇 운용 및 배터리 충전/방전을 위한 통합 전력제어 기술이 필요하다. 셋째, 다중 셀이 직렬로 연결된 고전압 배터리의 안전성을 확보하기 위해서는 배터리 과충전, 과방전 및 셀간 전압 불균형 방지 설계가 요하다.
 본 고에서는 무인차량에 적합한 전력제어 및 운용개념을 군사용 무인차량에 적용하면서 연구된 부하 가변 특성에 기반한 전력 생성 최적화, 임무 유형에 따른 최적 에너지 운용 및 고전압 배터리 관리/제어 기술에 대해 논하고자 한다.
본 고에서는 무인차량에 적합한 전력제어 및 운용개념을 군사용 무인차량에 적용하면서 연구된 부하 가변 특성에 기반한 전력 생성 최적화, 임무 유형에 따른 최적 에너지 운용 및 고전압 배터리 관리/제어 기술에 대해 논하고자 한다.
2. 가변 부하 특성에 기반한 전력 생성 최적화
가. 무인차량의 전력시스템 구성
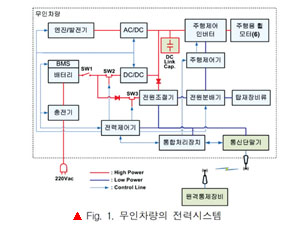
본 논문에 적용된 무인차량의 전력시스템의 구성은 Fig. 1과 같다. 무인차량을 운용하기 위한 전력 공급은 세 가지 방법으로 수행이 가능한데, 엔진 축에 연결된 발전기로부터 교류전원을 공급받아 이를 전력변환 처리(AC/DC)하여 고전압 전력을 공급하는 방법, 배터리의 전원을 전력변환 처리(DC/DC)하여 고전압 전력을 공급하는 방법 및 두 가지 방법을 병행하여 공급하는 방법이 가능하다. 무인차량의 전원은 고전압과 저전압으로 두 가지를 사용하는데, 고전압은 무인차량의 주행을 위한 휠 모터 또는 필요시 현수장치 가변암 구동용 전원으로 사용하고, 저전압은 탑재된 구성품의 전원 공급 및 임무장비 동용 전원으로 사용한다.
나. 운용 모드에 따른 전력생성 최적화
임무의 유형에 의해 가변되는 부하 특성에 따라 소요되는 전력을 생성/공급하기 위해 Fig. 2와 같은 엔진/발전기 특성 시험 결과를 활용하였다. 엔진/발전기에서 전력발생 모드를 봇 주행 모드와 배터리 충전모드로 구분하여 선정된 모드에 따라 효율적으로 전력의 발생이 가능하도록 하였다. 이와 같이 엔진/발전기 운용 모드를 2단계로 구분하여 설계하고 운용 제어를 수행함으로서, 엔진/발전기의 전력 발생 효율을 극대화하는 효과 및 배터리의 충전 SOC(State Of Charge)를 일정수준 유지하고, 충전 SOC의 변화량을 최소화하여 배터리의 사용 기간을 증대시켜 주는 효과를 얻을 수 있었다. 또한 배터리의 충전 SOC를 일정수준으로 유지토록 함으로서, 부가적인 효과로 운용시험 이후 배터리의 셀전압 밸런싱을 자동적으로 수행하는 상태를 제공함과 동시에 외부충전기를 통한 충전시간을 줄여주는 효과를 얻을 수 있었다.
 다. 구성요소 제어
다. 구성요소 제어
엔진 속도제어, DC Link 전압제어 및 배터리 전력제어 등 전력시스템의 각 구성 요소의 제어 방법에 대해 설명한다. 첫째, 엔진 속도를 가변하는 부하조건에 대하여 연료소비를 최소화할 수 있도록 제어함으로서 엔진이 최적 운전점에서 동작되도록 한다. 엔진속도는 엔진의 쓰로틀 밸브를 직접 구동하여 제어하였다. 둘째, 엔진/발전기와 배터리의 입출력 전력을 독립적으로 제어하기 위해서는 DC Link 전압을 일정 범위 이내로 유지시키는 것이 필요한데 본 연구에서는 빈번한 충/방전에 의해 배터리의 수명을 단축시키는 것을 방지하기 위하여 엔진/발전기와 전류제어가 가능한 PWM 정류기를 이용하여 DC Link 전압을 제어한다. 마지막으로, 배터리는 차량 기동을 위한 최대전력을 공급하고 감속시에는 회생에너지로 저장하는데 양방향 DC-DC 컨버터를 이용하여 배터리 충/방전을 제어한다.
3. 최적 전원 분배 및 에너지 운용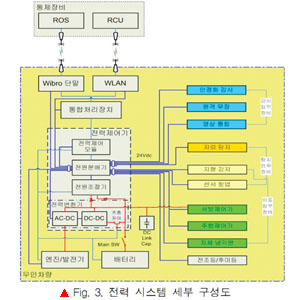 공간 및 중량의 제약이 있는 무인차량에 탑재된 엔진/발전기 및 배터리로부터 생성된 에너지로 시나리오 기반의 운용시간을 만족하기 위해서는 무인차량의 임무 유형에 따라 소요되는 탑재장비에 전원을 분배하는 통합 전력관리 및 최적의 에너지 운용체계의 설계가 필요하다. Fig. 3은 전력시스템 세부 구성도를 나타낸다.
공간 및 중량의 제약이 있는 무인차량에 탑재된 엔진/발전기 및 배터리로부터 생성된 에너지로 시나리오 기반의 운용시간을 만족하기 위해서는 무인차량의 임무 유형에 따라 소요되는 탑재장비에 전원을 분배하는 통합 전력관리 및 최적의 에너지 운용체계의 설계가 필요하다. Fig. 3은 전력시스템 세부 구성도를 나타낸다.
일반적으로 무인차량에 탑재되는 전력원은 허용되는 장착 공간에 따라 차이가 있을 수 있으나, 현재 수준의 기술로는 제한된 용량의 전력 공급원이 탑재될 수 밖에 없다. 탑재된 전력 공급원을 활용하여 임무를 수행함에 있어서, 고속 이동에는 엔진/발전기와 배터리를 사용한 전력을 필요로 하지만, 무성으로 저속 이동, 감시 및 지뢰탐지 임무를 수행하는 경우에는 배터리 전력만을 사용해야 하는 경우도 발생한다. 이와 같은 운용 환경에서, 무인차량에 할당된 임무를 성공적으로 완수하려면 제한된 전력 공급원을 효율적으로 이용하는 방법이 필수적으로 요구되는 실정이다.
임무 유형에 따른 무선기반의 전원 분배장치는 무인차량에 장착된 10종 이상의 탑재품에 대하여 선택된 임무유형에 따라 필요한 탑재품에만 전원을 공급한다. 이를 위해 Fig. 4와 같이 최적 에너지 운용을 위한 운용모드를 설정하고, Fig. 5와 같이 마스터/슬레이브 모드로 전원분배 기법을 적용하였다. 이 기법은 운용자가 개별 탑재품의 전원 공급을 결정하는 방식이 아닌 임무 유형 선정에 따라 자동적으로 운용에 해당되는 탑재품에만 전력을 공급하고, 기타의 장비에는 전원을 OFF하여 불필요한 전력낭비를 방지하는 기법으로, 운용자의 편리성과 에너지 효율성을 증대시킨 통합 전력관리 및 최적의 에너지 운용이 가능하다.
전력운용 모드 설계로, Fig. 4에서 무인차량의 임무를 이동, 감시, 지뢰탐지 및 대기로 구분하고 각 임무별로 대기와 파킹을 포함시켰다. 여기서 무장의 임무는 감시장치와 상호 연계되어 임무를 수행하는 경우가 많으므로, 감시 임무에 포함하여 수행하도록 설정하였다. 또한 대기 임무는 각 임무에 포함되어 있는 대기 및 파킹 관련 세부 임무를 이중으로 모아 임무 선택에 용이성을 제공하였다. 대기 모드는 탑재장비에 전원이 공급되어 초기화를 수행하고 제어를 수행하지 않는 절전모드로 설정하였고, 파킹 모드는 탑재장비를 초기위치로 이동한 후 전원을 OFF 상태로 전환하는 모드로 설정하였다. Fig. 4에서 선택되는 임무의 유형에 따라 단일 임무만 수행되는 마스터 방식 또는 선택된 임무와 연계된 임무가 추가적으로 수행되는 마스터/슬레이브 방식의 임무를 수행하게 된다.
Fig. 4에서 선택되는 임무의 유형에 따라 단일 임무만 수행되는 마스터 방식 또는 선택된 임무와 연계된 임무가 추가적으로 수행되는 마스터/슬레이브 방식의 임무를 수행하게 된다.
먼저 마스터와 슬레이브 방식의 임무 유형에 대한 개념을 정의한다.
운용자가 직접 선택하는 임무가 다른 임무와 연계성 없이 단독으로 수행되는 임무 수행 방식을 마스터 방식의 임무로 정의하였고, 운용자가 선택한 임무의 세부사항에 따라 연계된 다른 임무의 세부 운용사항이 결정되어야 하는 임무를 슬레이브 방식의 임무로 정의하였다. 제시된 임무는 동일 임무라 할지라도 선택에 따라 마스터 방식으로 또는 슬레이브 방식으로 운용될 수 있다. 예를 들면, 이동 모드를 마스터 방식으로 선택하면, 다른 임무와 연계성이 없이 단독으로 수행이 가능한 마스터 방식으로 수행되는 임무이다.
그러나 지뢰탐지 모드를 마스터 방식으로 선택하면, 지뢰탐지의 세부임무 선택에 따라 부가적으로 이동 모드의 세부 임무가 슬레이브 방식으로 연계되어 결정되어야 지뢰탐지 임무를 원활하게 수행할 수 있으므로 이때의 이동 모드는 슬레이브 방식의 임무이다.
 Fig. 5는 Fig. 4에서 제시된 임무를 마스터 방식으로 선택함에 따라 선택된 임무 수행에 전원 공급이 필요한 탑재 장비별로 마스터 방식 또는 마스터/슬레이브 방식으로 전원 분배를 설명하기 위하여 마스터 방식만을 선별하여 제시한 내용으로서 이동 임무에 포함된 유·무성은 엔진/발전기의 ON/OFF를 의미하고, 감시 임무에 포함된 이동·고정은 무인차량을 이동 또는 정지 상태에서 감시를 수행함을 결정한다.
Fig. 5는 Fig. 4에서 제시된 임무를 마스터 방식으로 선택함에 따라 선택된 임무 수행에 전원 공급이 필요한 탑재 장비별로 마스터 방식 또는 마스터/슬레이브 방식으로 전원 분배를 설명하기 위하여 마스터 방식만을 선별하여 제시한 내용으로서 이동 임무에 포함된 유·무성은 엔진/발전기의 ON/OFF를 의미하고, 감시 임무에 포함된 이동·고정은 무인차량을 이동 또는 정지 상태에서 감시를 수행함을 결정한다.
“






