유연하고 획기적인 로봇 및 핸들링 그리퍼 솔루션
들어는 봤나? 정전기력 컨트롤 그리퍼
‘EA Gripper’
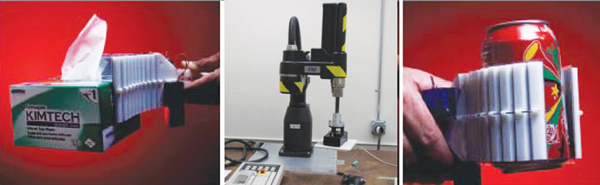
미국 스탠포드 대학 부설의 연구기관인 SRI(Stanford Research Institute) International 은 최근 유연하고 획기적인 로봇 및 핸들링 그리퍼 솔루션을 발표하였다. EA(Electro Adhesive) Gripper로 알려진 본 제품은 그리퍼 패드와 집을 제품 사이에 발생하는 정전기력을 컨트롤하여 Gripping을 가능케 하는 신기술을 사용하여, 집을 제품의 내부 및 외관에 변형을 주지 않고 안전하게 핸들링 할 수 있게 한 최신 기술의 그리퍼이다.
공압 및 기계적인 그리퍼는 제품 표면에 힘을 가하여 흡착 및 제품을 잡게 되어 대상 제품의 외관 및 내부에 강제적인 힘이 가해지는 반면, EA Gripper는 그리퍼 패드에 발생하는 국부적인 정전기력으로만 대상 제품을 홀딩하게 되어 과거에 그리핑의 난제로 인한 자동화 및 기계적인 핸들링에 어려움이 있던 제품들의 생산 및 핸들링에 새로운 Robotic Automation 솔루션을 제공할 뿐 아니라, 현재 널리 사용되는 Vacuum Cup 및 Mechanical Gripper를 빠르게 대체 할 것으로 예상된다.
또한 다양한 형태 및 모양의 그리퍼 디자인이 가능하고 크기에 제한이 없어 로봇 및 SI사를 시작으로 하여 빠른 시일 내 산업계 전반에서 널리 사용될 것으로 SRI International은 내다보고 있다.
주요 응용분야는 다음과 같다.
- 일반 PCB 및 F-PCB의 핸들링 및 조립작업
- Solar Cell 및 LCD Glass 핸들링·수율 향상 및 표면 스크래치 방지
- 복합 화합물 및 직물의 펼침 및 복잡한 방향 확인 후 적층작업
- 전기 전자 및 소형 기계 부품의 Pick and Place 작업
- 식품 및 음료, 농수산물과 가공식품의 위생적인 핸들링 공정
- 유리, 과일, 종이, 광섬유 등 깨어지기 쉽고 변형이 있는 제품의 안정적인 핸들링 작업
- 바이오, 의료 연구소 및 제조라인 등
Adaptive Robotics jason.lee@adaptiverobot.net
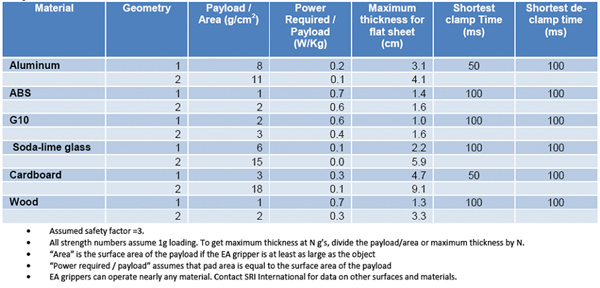
Key Product Parameters
- Assumed safety factor=3
- All strength numbers assume 1g loading. To get maximum thickness at N g`s, divide the payload/area or maximum thickness by N.
- `Area` is the surface area of the payload if the EA gripper is at least as large as the object
- `Power required/payload` assumes that pad area is equal to the surface area of the payload
- EA grippers can operate nearly any material. Contact SRI International for data on other surfaces and materials.