
서빙 로봇의 핸드 구동 장치
 ㆍ공고일자 : 2011년 6월 1일
ㆍ공고일자 : 2011년 6월 1일
ㆍ등록번호 : 1010380750000
ㆍ등록일자 : 2011년 5월 24일
ㆍ출원번호 : 10-2009-0065563
ㆍ출원일자 : 2009년 7월 17일
ㆍ심사청구일자 : 2009년 7월 17일
ㆍ출원인 : (주)유진로봇
ㆍ발명자 : 신경철, 박성주, 유호상
ㆍ대리인 : 조경화
ㆍ전체 청구항 수 : 총 3항
도면의 주요 부분에 대한 부호의 설명
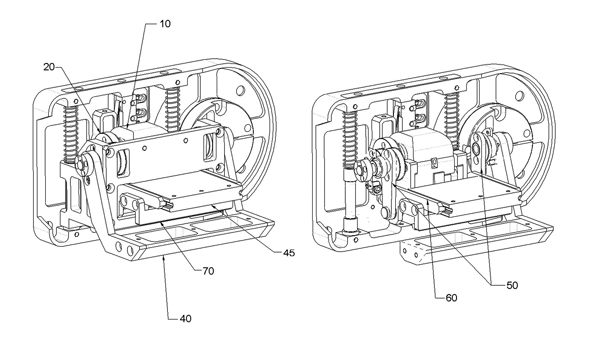
10 핑거 구동모터 20 핑거 기어 40 스윙 핑거 45 고정 핑거 50 스윙 링크 60 슬라이드 링크 70 트레이 위치 정렬용 푸셔
■ 배경기술
개발된 서빙 로봇의 핸드는 음식 운반용 트레이를 로봇의 자세 및 위치 제어를 통해 그립하여 운반한다. 로봇의 자세 및 위치 제어만으로는 서빙 로봇의 양쪽 핸드 사이에 트레이의 위치를 정확하게 정열하지 못할 뿐만 아니라 트레이가 틀어졌을 경우 위치 보정이 되지 않은 상태에서 트레이를 그립하게 된다. 이 때 위치 보정이 되지 않고 틀어진 상태의 트레이를 그립했을 경우 운반하는 도중에 트레이를 떨어트릴 수 있으며 지정된 장소에 내려놓을 때도 정확하게 내려놓을 수 없게 된다. 즉, 기존 서빙 로봇의 경우 로봇의 자세 및 위치 제어만으로는 정확하게 트레이를 그립할 수 없으며, 위치가 틀어진 트레이는 틀어진 상태로 그립해야 하므로 불안하다는 문제점이 있다. 또한 핸드부에 장착되는 트레이 정열 장치를 전용 액추에이터를 사용하여 구성할 경우 핸드부의 무게가 증가하여 가반 하중의 저하를 초래하고, 전용 액추에이터를 사용하면 시스템이 복잡해지고 별도의 구동 프로그램이 필요하다는 문제점이 있다.
■ 해결하고자 하는 과제
본 발명은 로봇이 트레이를 집을 때 동시에 트레이를 자동으로 정렬하도록 한 후 그립할 수 있도록 하므로 한 쪽으로 치우친 트레이도 로봇의 양쪽 핸드 중심에 일치하도록 하여 그립할 수 있게 할 뿐만 아니라 회전되어 위치가 틀어진 트레이도 똑바로 보정한 후 그립할 수 있도록 하는 서빙 로봇의 핸드 구동 장치를 제공하는데 그 목적이 있다.
■ 과제 해결수단
상기 목적을 달성하기 위한 본 발명의 일 실시예는, 서빙 로봇의 핸드 구동 장치에 있어서 핑거 구동모터, 핑거 구동모터에 연결되어 핑거 구동모터의 구동에 의해 회전하는 핑거 기어, 핑거 기어와 연동되도록 연결되는 스윙 링크 기어, 스윙 링크 기어에 연결·고정되어 스윙 링크 기어의 회전에 의해 회전되는 스윙 핑거, 스윙 링크 기어에 연결·고정되어 스윙 링크 기어의 회전에 의해 스위칭 핑거와 동시에 회전되는 스윙 링크, 스윙 링크에 연결되어 스윙 링크의 회전운동에 의해 직선방향으로 직선운동을 하는 슬라이드 링크, 슬라이드 링크가 직선 운동을 할 때 슬라이드 링크에 고정되어, 트레이를 양측 핸드 중심으로 밀어서 위치를 보정하는 트레이 위치 정렬용 푸셔로 이루어진 것을 특징으로 한다. 직선 운동하는 슬라이드 링크는 고정 핑거의 측면에 형성되어 있는 슬라이드 홈을 따라서 직선 운동을 하는 것을 특징으로 한다. 본 발명은 트레이 위치 정렬용 푸셔가 스윙 핑거의 회전 운동에 의해 트레이가 그립되기 전에 트레이를 양측 핸드 중심을 위치를 보정하는 것을 특징으로 한다.
■ 효과
본 발명은 로봇의 자세 및 위치 제어가 정확하지 않아도 양쪽 핸드 중심에 트레이를 위치하도록 한 후 그립할 수 있고, 틀어진 트레이도 틀어짐이 없이 보정하여 그립할 수 있도록 하는 효과가 있다. 또한 별도의 전용 액추에이터를 필요로 하지 않으므로 로봇의 가반 하중을 그대로 유지할 수 있으며, 핑거 온오프시 핑거에 링크로 연동하는 구조로 구동하도록 하여 동작상의 에러나 별도의 구동 프로그램이 필요 없는 효과가 있다. 본 발명은 구동부 구조를 간단하게 할 수 있어 유지 보수가 쉽고 제조 코스트도 다운할 수 있도록 하는 효과가 있다.
■ 발명의 실시를 위한 구체적인 내용
직선 운동하는 슬라이드 링크는 고정 핑거의 측면에 형성되어 있는 슬라이드 홈을 따라서 직선 운동을 한다. 트레이 위치 정렬용 푸셔는 스윙 핑거의 회전 운동에 의해 트레이가 그립되기 전에 트레이를 양측 핸드 중심에 위치를 보정한다. 본 발명에 따른 서빙 로봇의 핸드 구동 장치의 작용은 다음과 같다. 먼저 핑거 오프시는 스위칭 핑거가 핑거 구동모터 하측에 위치되어 있고, 슬라이드 링크는 스윙 링크에 의해 핑거 구동모터 측으로 당겨져 있으며, 트레이 위치 정렬용 푸셔 또한 내측으로 당겨져 핑거 구동모터와 근접한 위치에 놓이게 된다. 회전 핑거가 오프된 상태에서 서빙로봇의 양측 핸드 사이에 트레이를 그립시키고자 하는 경우 핑거 구동 모터가 구동하면 핑거 구동 모터에 장착된 핑거 기어가 회전한다. 핑거 기어가 회전하면 스윙 링크 기어가 회전하게 된다. 이때 스윙 링크 기어에 고정된 스윙 핑거와 스윙 링크가 동시에 회전하면서 스윙 핑거는 회전 운동을 하고, 스윙 링크는 슬라이드 링크를 직선방향으로 직선 운동을 하도록 한다. 즉, 핑거 구동모터가 구동되면, 하측에 위치되어 있던 스윙 핑거가 회전하여 고정 핑거와 평행한 위치가 된다.
직선 운동을 하는 슬라이드 링크는 고정 핑거의 측면에 형성되어 있는 슬라이드 홈을 따라서 직선운동을 하게 된다. 그리고 슬라이드 링크가 직선 운동을 할 때 슬라이드 링크에 고정된 트레이 위치 정렬 푸셔가 트레이를 양쪽 핸드 중심으로 밀어서 위치를 보정하도록 한다. 즉, 스윙 핑거가 회전 운동을 하여 트레이를 완전히 그립하기 전에 트레이 위치 정렬용 푸셔가 트레이를 양쪽 핸드 중심으로 먼저 위치를 보정하도록 한 후 그립하도록 함으로써, 먼저 위치 보정을 하도록 한 후 그립하도록 하여 트레이가 완전하게 위치 보정이 된 후에 그립되는 것이 가능하게 된다.스윙 핑거가 회전 운동을 하여 트레이를 완전히 그립하기 전에 트레이 위치 정렬용 푸셔가 트레이를 양쪽 핸드 중심으로 먼저 위치를 보정하도록 한 후 그립하도록 하는 핸드장치를 서빙로봇에 적용시킴으로써, 트레이에 주문된 음식물을 안전하게 서빙할 수 있도록 한다. 상술한 바와 같이 본 발명에 따른 바람직한 실시 예를 설명했지만, 본 발명은 상기한 실시 예에 한정되지 않고, 이하의 특허 청구범위에서 청구하는 본 발명의 요지를 벗어남이 없이 당해 발명이 속하는 분야에서 통상의 지식을 가진 자라면 누구든 다양한 변경 실시가 가능한 범위까지 본 발명의 기술적 정신이 있다고 할 것이다.






