
중공형 스마트로봇관절(MJMTM) 구현을 위한
서보 드라이버 개발
로봇 기술에 있어 항상 문제점으로 제기되어 왔던 모터와 드라이버의 분리된 구조에 따른 과도한 케이블 배선 문제 등의 해결을 위해 부각된 일체형 구조의 중공형 관절에 대한 연구가 현 로봇 기술 동향에 있어 차지하는 비중이 작지 않다. 본 지면에서는 중공형 로봇관절 모듈 구현을 위한 요소기술이라 할 수 있는 중공형 서보 드라이버에 관한 전반적인 내용을 통해 현 기술의 동향을 살펴본다.
1. 서론
최근 지능형 로봇 및 산업용 로봇 분야에서의 최대 이슈 중 하나는 일체형 구조의 중공형 관절 모듈의 개발에 있다. 일체형 구조의 중공형 관절이란 로봇의 관절시스템을 구성하는 모터, 감속기, 드라이버, 센서, 통신 등의 요소들이 각각 분산되어 있는 것이 아니라 하나의 장치에 통합되어 일체화된 관절을 의미한다. 이와 같은 일체형 구조의 중공형 관절은 기존의 로봇분야에서 큰 문제로 제기됐던 모터와 드라이버 분리 구조에 따른 과도한 케이블 배선 문제를 개선할 수 있으며, 중공형 관절 구조에 따른 모듈 재구성을 통해 다양한 시스템으로의 확장이 가능하다는 장점을 가지고 있다. 또한 기존 고가의 산업용 로봇의 경우 로봇과 로봇을 구동, 제어하는 드라이버 박스가 별도로 구축돼 있어 이동환경에서의 적용은 사실상 어렵다는 문제로 인해 중소기업에서는 산업용 로봇을 여러 대 구입해야 되는 어려움이 발생한다. 그러나 일체형 구조의 중공형 관절이 적용된 로봇의 경우 외부에 전원 및 통신 케이블만으로 구동이 되므로 이동환경에 최적화된 사용이 가능하다는 장점을 가지고 있다. 이러한 일체형 구조의 중공형 관절의 장점을 기반으로 최근에는 중소기업용 로봇의 최대 핵심 기술로서 화두가 되고 있으며 이에 따른 많은 연구가 이루어지고 있다. 본 기고에서는 일체형 구조의 중공형 관절 모듈 구현을 위한 핵심 내장모듈 중 중공형 서보 모터를 구동·제어하는 기능을 수행하는 모션 네트워크 기반의 중공형 서보 드라이버 구현에 대한 전반적인 내용을 기술하고자 한다.
2. 중공형 서보 드라이버 설계 및 구현
가. 중공형 관절의 구조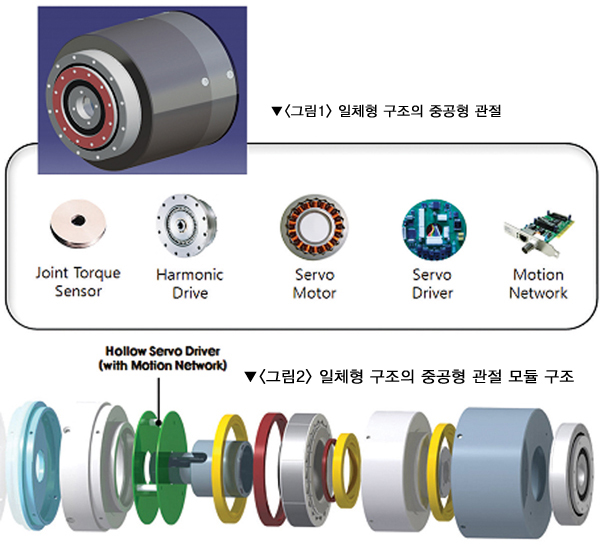 일체형 구조의 중공형 관절은 기계, 전자, 통신 부분이 결합된 최첨단 메카트로닉스 관절 모듈로서 케이블 배선 개선, 유연한 재구성 능력 등의 장점을 기반으로 현재 지능형 로봇 및 산업용 로봇 분야에서 많은 연구가 이루어지고 있다. 일체형 구조의 중공형 관절의 내부 구조는 기본적으로 <그림 1>과 같이 관절 외부로부터 작용하는 외력의 측정을 위한 조인트 토크 센서, 관절 구동을 위한 중공형 서보 모터, 관절 모터의 전원 및 제어를 담당하는 서보 드라이버, 상위 제어기와의 고속 모션 통신을 수행하는 모션 통신 장치, 이렇게 4가지로 구성된다. 본 기고에서는 중공형 관절 모듈을 구성하는 내장 모듈 중의 하나인 서보 드라이버 모듈에 대한 설계 및 구현에 관한 내용을 중점적으로 기술했다. 상위 제어기와의 고속 모션 통신을 통해 중공형 관절을 구동 및 제어하는 서보 드라이버 모듈은 <그림 2>와 같이 2장 보드 형태로 설계를 했으며 중공형 서보 모터와 중공형 관절 지지대 사이에 삽입되어 결합될 수 있도록 했다.
일체형 구조의 중공형 관절은 기계, 전자, 통신 부분이 결합된 최첨단 메카트로닉스 관절 모듈로서 케이블 배선 개선, 유연한 재구성 능력 등의 장점을 기반으로 현재 지능형 로봇 및 산업용 로봇 분야에서 많은 연구가 이루어지고 있다. 일체형 구조의 중공형 관절의 내부 구조는 기본적으로 <그림 1>과 같이 관절 외부로부터 작용하는 외력의 측정을 위한 조인트 토크 센서, 관절 구동을 위한 중공형 서보 모터, 관절 모터의 전원 및 제어를 담당하는 서보 드라이버, 상위 제어기와의 고속 모션 통신을 수행하는 모션 통신 장치, 이렇게 4가지로 구성된다. 본 기고에서는 중공형 관절 모듈을 구성하는 내장 모듈 중의 하나인 서보 드라이버 모듈에 대한 설계 및 구현에 관한 내용을 중점적으로 기술했다. 상위 제어기와의 고속 모션 통신을 통해 중공형 관절을 구동 및 제어하는 서보 드라이버 모듈은 <그림 2>와 같이 2장 보드 형태로 설계를 했으며 중공형 서보 모터와 중공형 관절 지지대 사이에 삽입되어 결합될 수 있도록 했다.
나. 중공형 서보 드라이버 설계 중공형 서보 드라이버는 크게 상위 제어기와의 고속 모션 통신을 수행하는 광 모션 통신 인터페이스부와 중공형 서보 모터를 구동 및 제어하는 인버터 드라이버부로 구분된다. 광 모션 인터페이스부는 최신 산업용 이더넷 기반의 국제 표준 제어용 네트워크 프로토콜을 적용하여 관절 모듈과 상위 제어기와의 모션 통신을 수행하는 방식을 적용했다. 또한 중공형 구조로 인해 집약되는 케이블 및 중공형 모터에서 유기되는 각종 EMI 노이즈의 영향에 대한 원천적인 차단을 위해 물리적인 통신 미디어에 광(Optic) 인터페이스를 적용했다. 광 모션 인터페이스부의 기본 구조는 <그림 3>과 같이 상위 제어기와의 통신 연결을 위한 광 트랜시버, 표준 모션 네트워크와의 연결을 위한 이더넷 PHY 인터페이스부, 표준 모션 네트워크 인터페이스 기능을 수행하는 네트워크 제어기, 이렇게 3가지로 구성되도록 설계했다.
중공형 서보 드라이버는 크게 상위 제어기와의 고속 모션 통신을 수행하는 광 모션 통신 인터페이스부와 중공형 서보 모터를 구동 및 제어하는 인버터 드라이버부로 구분된다. 광 모션 인터페이스부는 최신 산업용 이더넷 기반의 국제 표준 제어용 네트워크 프로토콜을 적용하여 관절 모듈과 상위 제어기와의 모션 통신을 수행하는 방식을 적용했다. 또한 중공형 구조로 인해 집약되는 케이블 및 중공형 모터에서 유기되는 각종 EMI 노이즈의 영향에 대한 원천적인 차단을 위해 물리적인 통신 미디어에 광(Optic) 인터페이스를 적용했다. 광 모션 인터페이스부의 기본 구조는 <그림 3>과 같이 상위 제어기와의 통신 연결을 위한 광 트랜시버, 표준 모션 네트워크와의 연결을 위한 이더넷 PHY 인터페이스부, 표준 모션 네트워크 인터페이스 기능을 수행하는 네트워크 제어기, 이렇게 3가지로 구성되도록 설계했다.
이와 같은 광 모션 인터페이스부는 표준 산업용 이더넷 통신의 OSI 계층인 1(Physical Layer), 2(Data Link Layer), 7(Application Layer) 계층 중 1, 2계층을 커버하고 있으며 마지막 7계층인 Application Layer의 통신 스택은 제어 프로세서에 사용된 32bit DSC 내부에 탑재했다. 서보 드라이버부는 광 모션 네트워크 인터페이스를 통해 수신된 정보를 기반으로 중공형 서보 모터를 구동 및 제어하는 기능을 수행하며, 모터 구동 간 측정되는 전류, 속도, 위치, 에러 상태 등에 대한 피드백 정보를 광 모션 네트워크 인터페이스를 통해 상위 제어기로 전송하는 기능을 수행한다. 서보 드라이버부의 기본적인 구성은 서보 모터 구동을 위한 3상 전압형 인버터부와 모터의 구동 전원 및 보드의 전원을 공급하는 전력 변환부, 서보 모터 제어 로직을 수행하는 제어부, 이렇게 3가지로 크게 구성이 된다.
<그림 4>의 서보 드라이버부는 역할 및 기능에 따라 다시 다음과 같은 2가지 영역으로 구분된다. 제어부에서는 표준 모션 네트워크 통신 7계층에 해당하는 어플리케이션 통신 스택을 탑재하고 있으며 통신 스택에 내장된 메일박스와 프로세스 데이터 통신을 통해 상위 제어기와의 파라미터 설정 정보 및 고속의 모션 정보를 송수신하게 된다. <그림 5>는 표준 광 모션 네트워크 프로토콜의 어플리케이션 통신 스택의 구조를, <그림 6>은 서보 모터 벡터 제어 구조를 나타낸다. 제어부의 또 다른 기능은 어플리케이션 통신 스택을 통해 송수신된 정보를 기반으로 중공형 서보 모터를 제어하는 것이다. 제어부의 프로세서는 고속의 32bit DSC(Digital Signal Controller)를 활용했으며 서보 모터의 최신 제어 기법인 자속기준 벡터 제어(FOC) 및 공간 벡터 전압 변조(SVPWM) 기법을 적용함으로써 서보 모터의 고속 제어 및 토크 제어 성능을 극대화했다. 3상 인버터부는 3상 서보모터의 구동을 위한 풀 브릿지 인버터 회로부가 설계돼 있으며, 통신 신호와 모터 구동 신호 사이의 노이즈 개선을 위해 Isolated DC/DC Converter와 Photo Coupler를 활용한 전원 및 신호 Isolation을 수행했다.
다. 중공형 서보 드라이버 구현 본 기고에서는 상기에서 제시한 설계를 기반으로 광 모션 통신부와 서보 드라이버 기능을 가지는 중공형 서보 드라이버를 구현했다. <그림 8>은 상위제어기와의 고속의 광 모션 통신을 수행하는 모션 통신부의 전/후면에 대한 구현 사진을 나타낸다. <그림 8>에서 제어부는 서보 드라이버부에 포함되나 보드 설계 공간의 원활한 확보를 위해 광 모션 통신부 보드 후면에 설계하고 구현했다. <그림 9>는 서보 모터의 구동을 담당하는 3상 전압형 인버터와 서보 모터 전원 및 보드 전원을 생성하는 전력 변환부의 기능을 가지는 인버터 드라이버 보드를 나타낸다. <그림 10>은 <그림 8, 9>의 보드를 결합한 광 모션 인터페이스를 가지는 중공형 서보 드라이버 보드의 최종 구현 모습을 나타내며 추후 중공형 관절 내부에 삽입, 결합된다.
본 기고에서는 상기에서 제시한 설계를 기반으로 광 모션 통신부와 서보 드라이버 기능을 가지는 중공형 서보 드라이버를 구현했다. <그림 8>은 상위제어기와의 고속의 광 모션 통신을 수행하는 모션 통신부의 전/후면에 대한 구현 사진을 나타낸다. <그림 8>에서 제어부는 서보 드라이버부에 포함되나 보드 설계 공간의 원활한 확보를 위해 광 모션 통신부 보드 후면에 설계하고 구현했다. <그림 9>는 서보 모터의 구동을 담당하는 3상 전압형 인버터와 서보 모터 전원 및 보드 전원을 생성하는 전력 변환부의 기능을 가지는 인버터 드라이버 보드를 나타낸다. <그림 10>은 <그림 8, 9>의 보드를 결합한 광 모션 인터페이스를 가지는 중공형 서보 드라이버 보드의 최종 구현 모습을 나타내며 추후 중공형 관절 내부에 삽입, 결합된다.
라. 동작 제어 실험  최종 구현된 중공형 서보 드라이버의 동작 실험을 위해 기 보유한 중공형 모터를 결합한 테스트 시스템을 구현했다. 테스트 시스템의 구성은 Windows OS가 설치된 상위 제어기로 사용될 노트북, 본 기고를 통해 구현된 중공형 서보 드라이버 모듈이 내장된 중공형 관절 모듈, 상위 제어기와의 통신을 위한 광 컨버터, 광 케이블 등으로 구성이 된다. 먼저 위치제어 실험을 수행했다. <그림 12>는 입력 위치 펄스로 13000pulse를 지령했을 경우의 서보 드라이버의 위치 제어 측정 결과를 나타내고, <그림 13>은 3000 rpm의 속도 지령을 수행했을 경우의 속도 지령 응답에 대한 측정 결과를 나타낸다. 또한 <그림 14>는 속도 지령 간에 발생 수행되는 내부 전류 제어기의 응답 파형에 대한 측정 결과를 나타낸다.
최종 구현된 중공형 서보 드라이버의 동작 실험을 위해 기 보유한 중공형 모터를 결합한 테스트 시스템을 구현했다. 테스트 시스템의 구성은 Windows OS가 설치된 상위 제어기로 사용될 노트북, 본 기고를 통해 구현된 중공형 서보 드라이버 모듈이 내장된 중공형 관절 모듈, 상위 제어기와의 통신을 위한 광 컨버터, 광 케이블 등으로 구성이 된다. 먼저 위치제어 실험을 수행했다. <그림 12>는 입력 위치 펄스로 13000pulse를 지령했을 경우의 서보 드라이버의 위치 제어 측정 결과를 나타내고, <그림 13>은 3000 rpm의 속도 지령을 수행했을 경우의 속도 지령 응답에 대한 측정 결과를 나타낸다. 또한 <그림 14>는 속도 지령 간에 발생 수행되는 내부 전류 제어기의 응답 파형에 대한 측정 결과를 나타낸다.
3. 결론
본 기고에서는 지능형 로봇 및 산업용 로봇 분야에서 차세대 핵심기술 중의 하나로 평가되는 일체형 구조의 중공형 관절 모듈의 개발을 위한 요소기술로서의 중공형 서보 드라이버 구현에 전반적인 내용을 기술했다. 제안된 중공형 서보 드라이버는 크게 모션 인터페이스 모듈과 인버터 드라이버 2가지로 구성돼 설계되었다. 모션 네트워크 인터페이스는 상위 제어기와의 모션 통신 수행 및 통신 노이즈 차단을 위해 광 기반의 모션 인터페이스를 적용한 구조를 사용했으며 제어부, 인버터부, 전력 변환부로 구성된 인버터 드라이버는 고속의 32비트 DSC를 적용한 벡터제어 및 공간 벡터 변조기술을 적용해 설계를 했다. 제시한 설계를 기반으로 실제 중공형 서보 드라이버를 구현했으며, 동작 실험을 통해 위치, 속도, 전류에 대한 응답을 확인한 결과, 전류 제어에서 전류 파형이 일정 부분 진동한 것을 제외하고는 원하는 지령에 대한 추종이 정상적으로 잘 이루어졌다. 전류 파형의 진동은 테스트 시스템으로 구축한 중공형 모터와 서보 드라이버 결합 시 중공형 모터의 회전 부가 정밀하게 설계되지 않아 회전 시 약간의 마찰이 발생해 나타난 결과이며, 수정이 가능한 부분이라 할 수 있다. 본 기고에서는 중공형 서보 드라이버의 동작 테스트를 위해 기 보유한 중공형 모터를 사용했다. 향후에는 중공형 서보 모터 및 관절 토크 측정 모듈에 대한 통합적인 개발을 통해 일체형 구조의 중공형 관절 모듈을 구현함으로써 종합적인 성능에 대한 검증내용을 기재하고자 한다.






