

Microrobotics Lab. Harvard Univ. 고제성 박사
소프트 액추에이터를 이용한 다양한 로봇 연구는 최근 로봇연구자들 사이에서 새로운 화두로 떠오르는 분야이다. 기존의 로봇연구와는 다르게 생물학, 유체역학, 소재학에 이르기까지 다방면에서의 노하우가 융합되어야 하는 어려운 분야이지만, 그만큼 새로운 적용에 대한 기대가 높아 잠재성이 뛰어난 분야이기도 하다. 본지에서는 초소형 생체모사로봇을 연구하고 있는 고제성 박사의 인터뷰를 기계·건설 공학연구정보센터의 도움을 받아 소개한다.
Q. 귀하가 진행하고 있는 연구에 대해 소개하자면.
A. 현재 신소재와 다양한 제작 공정을 이용해 생체모사로봇을 디자인하고, 이러한 접근의 가능성, 효용성, 경제성을 확인하는 연구를 수행하고 있다.
생물은 다양한 특성의 재료들이 적재적소에 위치하고, 로봇이 구현하기 힘든 성능을 보여주는 예가 많으며, 재료, 가공, 전기, 전자, 설계 기술의 발달로 점점 구현 가능한 요소가 많아지게 되면서 생물의 뛰어난 특성을 분석해 로봇에 알맞게 적용하는 것이 가능해지고 있는 상황이다.
미래에는 이 연구가 경제성, 안전성을 모두 갖추게 되어 모든 사람들이 로봇을 더욱 가깝게, 일상 속으로 가져갈 수 있는 기술이 되기를 희망하며 연구를 진행하고 있다.
Q. 초소형 생체모사로봇 연구를 진행하게 된 계기는 무엇인가.
A. 학부 시절에 기계공학을 공부하면서 로봇은 관절과 링크를 가지고 전기 모터나 유압 장치로 움직이는 기계라고 생각했고, 그런 로봇을 만들고 싶어 기계를 전공으로 선택했다.
이후 보다 심도 있는 연구를 위해 대학원 진학을 고려하던 중 당시 Harvard Microrobotics Lab. PostDoc(포닥)이었던 조규진 교수님으로부터 Robert J. Wood 교수의 ‘복합재료를 이용한 소형 로봇 제작에 관한 논문’을 소개받게 됐다. 개인적으로 충격적이면서도 새로운 개념의 논문이라고 생각했다.
논문에서 언급하는 로봇과 기존에 생각해왔던 로봇의 가장 큰 차이점은 관절이다. 대부분 축과 베어링을 연상시키는 관절 조인트가 유연한 필름으로 제작되고, 단단하고 가벼운 시트형 탄소복합재료가 링크가 되는 구조로, 관절이 회전한다기보다 접힌다는 개념이 더욱 적합하다.
이후 2008년 9월, 서울대학교 조규진 교수님와 함께 처음 연구를 시작했고, 7년 뒤 김호영 교수님을 만나 수상에서 도약하는 소금쟁이 로봇을 연구했다.
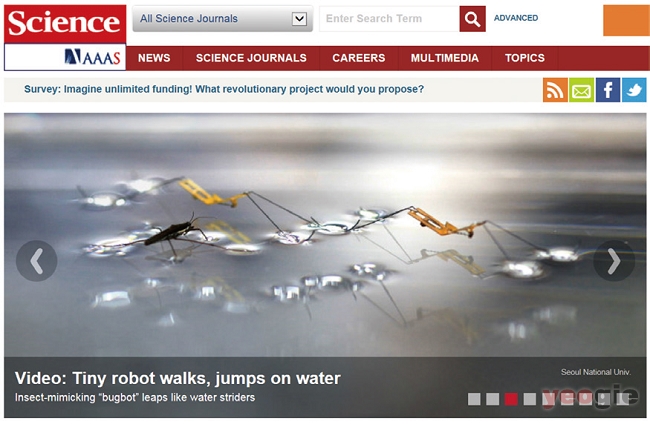
사이언스 저널 웹페이지에 소개된 소금쟁이로봇
Q. 연구 중 어떠한 난관에 봉착했고, 또 해결했나.
A. 연구 중 가장 힘들었던 부분은 로봇이라는 공학적인 분야와 생물학, 유체역학 등 타 분야를 접목해야 했던 부분이다. 지금도 연구를 지속해야 되는 부분들이 많이 있다.
생체모사로봇은 각 분야의 깊이 있는 연구가 뒷받침되어야 하고, 모두의 관심사를 풀어내야 했기 때문에 다양한 관점과 많은 토론으로 핵심적인 내용을 도출해야 한다. 토론이 진행될수록 더욱 깊은 의문점이 생겨나는 상황에서, 현재 이야기할 수 있는 내용을 완벽하게 아우를 수 있도록 연구 목표를 한정해야 한 단계 더 나아갈 수 있다는 것을 느꼈다. 중요한 것은 지금 연구와 관련해 얼마나 이해를 하고, 이를 설명할 수 있는가 하는 점으로, 토론 과정에서 발생된 많은 의문들은 다음 연구를 위한 좋은 주제가 될 수 있을 것이라고 생각한다.
한편 연구 분야 특성상 여러 새로운 소재에 대한 정보 부족으로, 필요한 특성은 모두 실험을 거쳐야 한다는 어려움도 있다. 신소재의 경우 조건에 따라 특성이 많이 변하기 때문에 원하는 성능을 확보하는데 애로가 있었지만, 로보틱스를 비롯해 생물학, 유체역학, 재료 등 다방면의 전문가들로부터 깊이 있는 조언과 자료를 제공받아 로봇에 접목할 방법을 찾고, 많은 실험을 통해 로봇 디자인을 완성할 수 있었다.
Q. 귀하와 함께 연구를 진행했던 인프라에 대해 소개하자면.
A. 서울대학교 공과대학 기계항공공학부에서 학부 생활을 마치고, 군대 2년을 제외한 지난 10년 간 동 대학에서 연구를 진행했다.
학부를 졸업한 시점에서 조규진 교수님 연구실의 창단멤버로서 대학원 생활을 시작했고, 6년 뒤 하버드 Microrobotics연구실과 협업을 진행하게 됐다.
이후 박사 학위를 수료하고 더욱 많은 경험을 위해 초소형 날개짓 비행로봇 Robobee로 유명한 Rob Wood 교수님의 연구실에서 2년 가까이 생체모방 디자인과 접어서 만드는 로봇 연구에 매진했다.
이 연구실 또한 로보틱스 분야의 특성을 최대한 살리기 위해 압전소자, 전자기, 정전기, 스마트 재료 등 다양한 액추에이터 및 적층을 기본으로 하는 제작 공정, 소프트 로봇, 생체학 등 여러 분야를 연구하고 있으며, 20여 명의 박사 후 연구원(포닥)과 13명의 대학원생, 다수의 엔지니어 스텝들이 유기적으로 연구를 진행하고 있다.

ASME IDETC 2014, Compliant Mechanism Award에서 조교진 교수와 함께 수상하는 모습
Q. 연구 활동을 하며 평소 느꼈던 보람이 있다면.
A. 생체모사로봇 연구는 역사가 길지 않아 아직까지도 생소하게 생각하는 연구자들이 많다. 장점이나 가능성이 증명되지 않은 분야이기 때문에 기반기술이 많이 필요한 분야이다.
그런 만큼 연구 초기의 기반 기술 노하우를 축적해나간다는 점이 가장 큰 매력이다. 작은 한걸음이 이 분야 전반에 영향을 끼칠 수 있는 결과로 나타날 때, 그리고 다른 여러 연구자들이 인정해줄 때 항상 보람을 느낀다.
Q. 향후 이 분야를 연구하고자 하는 후학들에게 해주고 싶은 조언은.
A. 최근 금속을 비롯해 단단한 재료에서 벗어나 유연하고, 보다 자유도가 높은 재료를 이용한 로봇의 설계 및 제어가 학계 전반에서 급격히 활성화되고 있는 것을 느낀다. 따라서 설계 및 제조 공정 또한 기존의 기계 제작과는 많이 다르게 접근하게 되어 학부과정에서 배운 내용을 기반으로 새로운 아이디어를 적용할 기회가 많아지고 있다.
아직 기반이 없는 상태에서 기초적인 데이터베이스부터 차근차근 쌓아나가는 분야이기 때문에 순간적인 아이디어가 큰 역할을 할 수 있는 분야라고 생각되며, 창의적인 접근과 오랜 시간의 시행착오를 거친다면 세계를 선도할 수 있는 결과를 얻을 수 있을 것으로 생각된다.
Q. 향후 연구 활동에 대한 계획.
A. 현재는 크게 두 가지 프로젝트를 진행하고 있다. 하나는 Printable Programable Machine이라는 프로젝트로, 프린팅이나 접어서 만드는 로봇 설계 및 제작이며, MIT, UPENN과 공동으로 연구하고 있다. 누구나 손쉽게 접어서 로봇을 만들 수 있으면서, 로봇이 기어가고, 잡고, 드론과 결합해 날아다니는 콘셉트의 로봇이다.
또 다른 한 가지는 빠르고 큰 힘을 가진 생체모사기계 또는 로봇의 원리와 특성을 규명하는 연구에 하버드팀 연구원으로 참여하고 있다. 생물학, 재료공학, 로보틱스 등 다양한 분야의 연구실과 듀크, 하버드, 스탠포드, 어바인, 메릴랜드, 매사추세츠 등 유수 학교들과의 협력을 통해 작년부터 시작된 프로젝트로, 대부분 공동 연구인 것이 특징이다.
개인적으로 기존 로봇의 한계를 다른 방식으로 해결해나가는 시도를 계속해나갈 계획이며, 언젠가는 지금 연구하는 로봇기술이 일상생활 속에서 널리 사용되는 그날까지 수만 년의 진화를 거쳐온 생물과 자연에서 배우는 시도 역시 꾸준히 지속할 것이다.
고제성 박사가 참여한 논문의 서지 정보
A. Je-Sung Koh, Eunjin Yang, Gwang-Pil Jung, Sun-Pill Jung, Jae Hak Son, Sang-Im Lee, Piotr G. Jablonski, Robert J. Wood, Ho-Young Kim and Kyu-Jin Cho. ‘Jumping on Water: Surface Tension?Dominated Jumping of Water Striders and Robotic Insects.’ Science 349, no. 6247 (2015): 517-521.
Je-Sung Koh, Sa-Reum Kim and Kyu-Jin Cho, ‘Self-Folding Origami using the Torsion Shape Memory Alloy Wire Actuators’, Proceedings of the ASME IDETC/CIE, 2014. (Compliant Mechanisms Award)
Je-Sung Koh, and Kyu-Jin Cho, ‘Omega-shaped Inchworm-inspired Crawling Robot with Large-Index-and-Pitch (LIP) SMA Spring Actuators’, IEEE/ASME Transactions on Mechatronics, Vol. 18, No. 2, pp. 419-429, Apr. 2013.
기계·건설 공학연구정보센터 www.materic.or.kr






