
KUKA 제조용 로봇의 다양한 어플리케이션
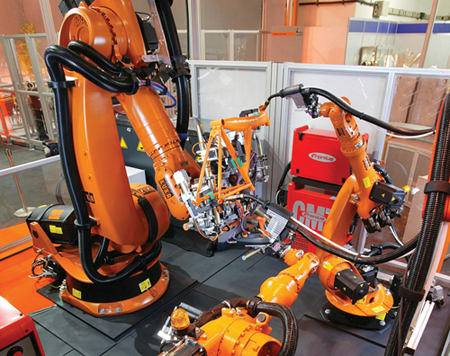
Welding Application
산업용 로봇의 글로벌 서플라이어로 인정받고 KUKA는 거의 모든 가반하중 클래스 및 기종의 다양한 산업용 로봇 및 로봇 시스템을 공급하고 있다. 본 지면에서는 전 세계의 각 산업분야에서 다양하게 쓰이고 있는 KUKA의 어플리케이션들을 소개함으로써 로봇의 활용도와 쓰임의 폭을 조망해본다.
스폿웰딩을 통한 자동차 프런트 엔드의 용접
Task
DaimlerChrysler에 납품하는 자동차 부품업체 Lapple은 Mercedes CLK의 프런트 엔드를 생산하고 있다. 하지만 3교대 작업과 ‘저스트 인 타임(Just in Time)’ 생산방식으로 인해 정확한 용접 공정 및 탁월한 가용성이 요구되던 차였다.
Just in Time 생산방식도 문제없이
CLK의 프런트 엔드의 제조를 위하여 Lapple은 18대의 KUKA 로봇으로 구성된 제조셀의 제작을 의뢰했으며, 이 셀은 매일 2교대 작업으로 프런트 엔드 170유닛에 해당하는 생산용량으로 설계됐다. 하지만 하루 수요가 280유닛으로 증가하자 Lapple은 기존 제조셀을 21대의 로봇이 투입되는 제조셀로 개조하고 3교대 작업을 도입했다. 하지만 이후에 또다시 생산 수요가 430유닛으로 증가함에 따라 제2 제조셀에 대한 투자가 불가피 했다.
이 새 제조셀에 20대의 KUKA 로봇이 투입되었으며, 이중 각각 5대는 프런트 엔드의 좌우측 휠 하우징을 위한 두 개의 서브어셈블리 영역에 투입됐다.
메인 라인에서는 각 컴포넌트가 완전한 프런트 엔드로 용접된다. 20대의 로봇은 공압 용접건으로 저항 스폿용접을 담당하는 3대의 KR 150 및 14대의 KR 125, MAG 아크 용접용으로 쓸 1대의 KR 15, 그리고 스터드 용접용으로 쓸 1대의 KR 125로 구성되었으며, 여기에 이전에 설치된 셀에서도 작업하는 다른 1대의 KR 125가 추가되었다.
시스템 사이에 배치된 이 로봇은 다양한 서브어셈블리를 용접한다. 새로운 시스템에 채용된 로봇은 프런트 엔드당 110개의 판금을 접합하는데, 로봇은 각각 약 1,200회의 스폿 용접 및 39회의 스터드 용접을 수행하는 한편, 총 길이 약 1,100mm의 용접심을 용접하게 된다.
Benefits
* 높은 반복 정밀도 및 가용성
로봇 선택과 관련하여 최우선적으로 반복 정밀도 및 가용성이 고려되었다. 이미 3교대 작업이 이루어지고 있다는 점을 감안하여 예비 생산 용량을 확보하기 위하여 Lapple은 스크랩 발생의 억제를 원했다.
새로운 제조셀의 1일 생산용량은 280유닛이다. 로봇은 거의 100%에 달하는 가용성으로 운영되고 있다. 제조셀 전체에 대한 가용성은 용접봉의 교환을 포함하여 약 90%에 달하고 있다.
* 감소된 예비품 재고
한 회사의 로봇을 집중적으로 사용함으로써 예비품 재고가 최소화되었다. 이러한 표준화는 트레이닝 및 최종적으로 머신의 운영을 용이하게 한다.
* Windows 유저 인터페이스
로봇의 프로그래밍은 사용업체의 직원에 의해 이루어졌으며, 이 과정에서 KUKA Control Panel의 Windows 유저 인터페이스의 이점이 부각되었다.
Lapple은 KUKA의 새로운 PC 기반 컨트롤러와 기존 시스템을 동시에 사용할 것인지 또는 기존 컨트롤러만 계속 사용할 것인지를 오랫동안 숙고했다. 고장 처리 또는 차량에서 기술적 변경으로 인한 프로그래밍 변경을 감안한다면, 현재 동사는 새로운 제조셀의 도입으로 엄청난 시간 절약의 이익을 얻고 있다.
* 자동화를 통한 경제성 제고
로봇 1대당 3명의 작업자가 투입되어야 하므로, 수동 용접은 로봇과 비교하여 그 경제성이 매우 낮다. 이외에도 무거운 용접건은 핸들링이 어렵고, 과중한 작업 후에는 추가적인 휴식 시간이 필요할 수 있다. 또한 경우에 따라서 교대 중에 교환이 요구될 수도 있다는 단점도 있었다.
하지만 로봇은 지속적으로 높은 품질을 유지할 수 있었으며, 이를 통해 제조셀의 경제성을 더욱 증대시켰다. 이외에도 Lapple의 경우 투자금 회수기간이 약 6개월이라는 짧은 시간이었다는 이점도 있었다.
▶ 시스템 구성 - 약 80대의 KUKA 로봇 - Windows 유저 인터페이스가 탑재된 Control Panel을 구비한 PC 기반 KUKA 로봇 컨트롤러
아크웰딩을 통한 안전 관련 부품의 용접

Task
SBH는 모든 토목공학 어플리케이션을 위한 현대적 Shoring Technology를 공급하는 업체이다. 컴포넌트의 제조 시에는 안전과 관련된 사항을 엄격하게 준수해야 하는데, 그 이유는 차후에 자재가 교통량이 많은 도로 또는 빌딩에서 그 하중을 견뎌야 하기 때문이다.
과거에 SBH는 모든 부품을 수동으로 용접했다. 일정하게 유지되는 우수한 품질 및 더욱 유연한 제조 공정을 위하여 회사는 공정 자동화를 계획했다.
더 유연하게, 하지만 품질은 일정하게
우선 통합된 터치 및 아크 센서를 통해 SBH의 요구를 만족시키는 KUKA의 6축 다관절 로봇 KR 6을 선택했다. 또한 로봇은 개선된 처리 용량을 보장하는데, 이는 두 개의 작업장 사이를 이동하면서 작업하므로 셋업으로 인한 가동 정지 시간이 발생하지 않기 때문이다. KR 6가 하나의 작업장에서 용접 작업을 수행하는 동안 작업자는 다른 작업장에서 완성된 부품을 크레인으로 제거하고 새 것으로 교체한다. 이러한 프로세스 때문에 로봇의 대기 시간은 발생하지 않는다. 또한 로봇 컨트롤러는 KR 6의 6개의 축 뿐만 아니라 리니어 유닛의 동작 그리고 8~9차 축으로 기능하는 전환 치의 동작도 컨트롤한다.
길이가 약 2m이고 무게가 약 500kg인 롤러 슬라이드 및 0.5~2.5m 길이의 연결 피스와 같은 자재는 스폿 용접을 통해 수동으로 일차 용접된다. 그 다음 자재는 크레인을 통해 로봇 셀이 있는 작업장으로 내려지고 설정된 영점에 포지셔닝 된다. 이어서 KR 6은 터치 센서를 통해 심을 식별하고 참조 모델과 비교하여 자재에서의 형상 편차를 측정한다.
그 다음 펄스 MAG 용접 공정이 이어진다. 용접 토치가 접합부 중앙에서 변위되면, 컨트롤러는 양측 접합부의 비교에서 변동하는 전류 세기에 반응하는 아크 센서를 통해 이를 감지한다. 이 때 컨트롤러는 편차를 보상하기 위해 축의 상응되는 조절을 통해 로봇을 조정한다.
Benefits
* 새로운 기술을 통한 경쟁력 확보
이번 투자를 통해 SBH는 새로운 기술을 도입했고, 동사는 경쟁력을 확보할 수 있었다. 이러한 투자가 없었다면 중장기적으로 타 공급업체에 비해 불리한 조건에 처했을 수도 있었다. 경제성 제고 외에도 SBH는 제품에 대한 신뢰성 확보를 통해 기업 이미지 제고까지도 기대하고 있다.
* 일정하게 유지되는 품질
로봇의 우수한 반복 정밀도를 통해 SBH는 안전 관련 부품에서 품질을 일정하게 유지시킬 수 있었다.
* 탁월한 유연성
용접할 자재의 수량이 점진적으로 증가함에 따라 탁월한 유연성에 대한 요구가 발생했다. 현재 KR 6는 주로 SBH 더블 슬라이드 레일 시스템의 롤러 슬라이드와 연결 피스를 용접하고 있다. 슬라이드에 대한 사이클 타임은 60분이고 연결 피스 경우 30분이다. 용접할 자재의 모든 치수는 로봇 컨트롤러의 서브 프로그램에 저장되어 있어 신속하게 불러올 수 있다.
* 최소 95 %에 달하는 가용성
로봇 셀의 높은 이용도를 감안하여 적어도 95 %의 가용성이 요구되었었다. KUKA College에서 교육을 이수한 직원을 통해 자체적으로 해결할 수 없는 장애는 KUKA 시스템 파트너 Bank에 의해 24시간 내에 처리되고 있다.
* 반으로 줄어든 공정 시간
자재의 공정 시간은 절반으로 줄일 수 있었고 이로써 인건비를 현저하게 절감할 수 있었다. 로봇 셀의 효율성을 더욱 높이기 위하여, 프로그램 선택이 간단함에도 불구하고 큰 배치 사이즈로만 가동된다. 이를 통해 기타 제조 공정에 독립적으로 운용될 수 있었다.
▶ 시스템 구성 - C형 페데스탈에 연결된 상태로 리니어 유닛에서 이동하는, 터치 및 아크 센서를 구비한 KUKA 로봇 KR 6 - Windows 유저 인터페이스가 탑재된 Control Panel을 구비한 PC 기반 KUKA 로봇 컨트롤러 - 리니어 유닛
아크웰딩을 통한 알루미늄 차체의 용접

Task
자동차 부품 공급업체인 CARmetal은 AIXAM MEGA 그룹의 다른 공급업체 공장과 연계되어있는 까닭에 매일 확정된 수량의 차체 프레임을 제작해야 한다. 이와 함께 증가하는 생산량으로 인해 이 회사는 현대적 로봇 셀에 대한 투자를 결정했다.
이 회사에게는 우수한 가속 능력을 통해 구현되는 짧은 사이클 타임, 정밀한 핸들링 및 탁월한 가용성을 통한 효율성 제고가 가장 중요했다. 또한 셀의 설계 시 차후의 2교대 작업의 도입 및 생산속도의 증가도 고려되어야 했다.
늘어나는 생산량, 로봇으로 잡는다
CARmetal은 수동 용접 스테이션을 대체할 2대의 KUKA 로봇 KR 30L15의 도입을 결정했다. 이 로봇은 펄스 MIG 용접법에 따라 4~12cm 길이의 용접심으로 알루미늄 프레임을 용접한다. 용접 작업 전 다른 가공 셀에서는 언더바디 및 사이드 패널과 같은 서브어셈블리가 조립된다. 이후 이 부품은 로봇 셀로 전달되고 여기에서 프레임으로 접합된다. 이를 위해 작업자는 서브어셈블리를 제조 프레임에 올려놓게 되며, 여기에서 공압식 홀드 다운 클램프에 의해 고정된다. 그리고 마지막으로 품질 점검 및 도장이 이루어진다.
KR 30L15가 설치된 가상 라인은 로봇 셀을 우선 두 개의 가공 영역으로 분할한다. 금속 롤러 셔터를 통해 로봇과 분리될 수 있는 양측 가공 영역에는 각각 두 개의 2축 포지셔너(DKP)가 배치되어 있다. 각각의 로봇은 각 가공 영역에서 그에 해당하는 DKP의 재료를 용접한다. 이것은 각 가공 영역에서 각각의 로봇이 하나의 프레임을 용접할 수 있으며, 반면 다른 가공 영역에 설치된 DKP는 같은 시간에 수동으로 로딩 및 언로딩 가능하다는 것을 의미한다.
KR 30L15는 각각 6개의 축을 가지며, 각 DKP가 회전과 틸팅 동작을 위한 두 개의 축을 갖고 있으며, 각 로봇이 두 개의 DKP를 컨트롤하므로 각 로봇 컨트롤러는 10개 축의 동작을 정확하게 제어해야 했다. 이와 동시에 좁은 작업 영역에서 로봇의 상호 충돌을 방지하는 기능 또한 수행해야 했다. 이외에도 로봇 컨트롤러는 전류 세기 및 가스 공급을 통하여 용접 공정을 제어하는데 사용되는 상응 신호를 용접 컨트롤러에 전송하는 역할을 한다.
Benefit
* 짧은 사이클 타임
로봇 셀의 설계 시 매우 짧은 사이클 타임이 우선적으로 고려되었다. 탁월한 가속 능력을 통해 로봇은 빠른 사이클을 구현했다.
* 개선된 품질
정밀한 작업을 통해 로봇은 높은 용접 품질을 보장한다. 로봇이 넓은 작동 범위로 모든 포인트에 접근할 수 있다는 점도 품질을 개선하는데 기여했다.
* 높은 가용성
로봇 셀의 설계에는 장애 발생 시 대체 가능한 수동 핸들링이 고려되지 않았으므로, 로봇 셀의 가용성이 가장 중요한 설계 요소였다. 이 때문에 KUKA Roboter GmbH가 독일의 Audi, Daimler-Chrysler VW와 같은 기업과 협력하고 있다는 사실이 로봇 선택의 결정적인 역할을 했다.
* 높은 수준의 안전성
로봇 셀의 가공 영역 사이에 설치된 안전 커튼은, 로봇이 파킹 위치에 정지된 상태라는 메시지가 KR 30L15 사이에 부착된 센서에 의해 전달되는 경우에만 열린다.
▶ 시스템 구성요소 - 두 대의 KUKA 로봇 KR 30L15 - Windows 유저 인터페이스가 탑재된 Control Panel을 구비한 두 대의 PC 기반 KUKA 로봇 컨트롤러 - 차체의 모든 포인트에 대한 접근성을 테스트하기 위한 RobCAD 소프트웨어를 통한 시뮬레이션
제공 : KUKA로보틱스코리아 www.kukakorea.co.kr







