
본 발명은 구성적으로 안정적인 신축구조 및 회전구조를 갖고 있어서 제품의 신뢰도를 높일 수 있고 가벼운 소재로 만들어져 있어서 장치의 작동부하를 줄일 수 있으며, 축의 습동 부위에 수지베어링을 적용함에 따라 자체윤활이 가능하여 윤활유를 급유해야 했던 기존의 번거로움을 해소하고, 축의 표면을 탄소 코팅함에 따라 습동 부위의 내열성을 향상시킬 수 있는 델타로봇에 관한 것이다.
대표도

주요부분 부호설명
150-중심축, 151-제 1축 하우징, 152-제 1축들, 153-제 1 수지베어링, 154-제 2축 하우징, 155-제 2축들, 156-제 2 수지베어링
*등록번호 : 10-0817864
*등록일자 : 2008년 3월 24일
*출원번호 : 10-2007-0118052
*출원일자 : 2007년 11월 19일
*특허권자 : 주식회사 로보스
*발명자 : 김선관, 이영우
*대리인 : 양광남, 연무식
*전체 청구항 수 : 총 5항
요약
본 발명은 델타로봇의 Z축 회전을 지지하는 중심축을 구성함에 있어 안정적인 신축구조 및 회전구조를 갖고 있어서 제품의 신뢰도를 높일 수 있고 가벼운 소재로 만들어져 작동부하가 적으며, 습동 부위에 수지베어링을 적용함에 따라 무급유가 가능한 델타로봇에 관한 것이다.
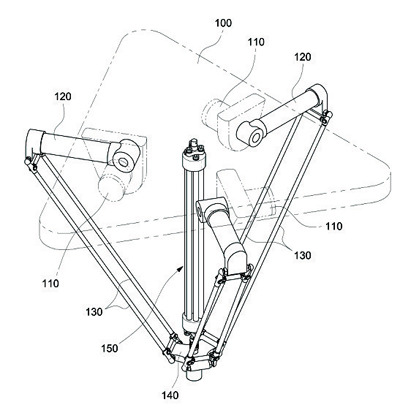
본 발명의 주요 특징은 베이스와; 상기 베이스에 상부가 지지가 된 채 감속모터에 의해 회절운동을 하는 로봇 암과; 상기 로봇 암의 하부에 관절 연결되는 3개의 링크 암과; 상기 3개의 링크 암 하단에 결합되는 이펙터와; 상기 베이스와 이펙터 사이를 연결하는 중심축과; 상기 이펙터의 하부에 결합되는 그립퍼로 구성된 델타로봇에 있어서; 상기 중심축은, 상기 베이스에 유니버설 조인트에 의해 연결되어 있는 제 1 축 하우징; 상기 제 1 축 하우징에 고정 볼트로서 일단이 결합되어 있는 제 1 축들; 상기 제 1 축들의 타단에 고정 볼트로서 결합되어 있는 제 1 수지베어링; 상기 이펙터에 유니버셜 조인트에 의해 연결되어 있는 제 2 축 하우징; 상기 제 2 축 하우징에 고정 볼트로서 일단이 결합되어 있는 제 2 축들; 상기 제 2 축들 타단에 고정 볼트로서 결합되어 있는 제 2 수지베어링;으로 구성되되, 상기 제 1 축들은 상기 제 2 수지베어링을 관통하게 설치되며, 제 2축들은 상기 제 1 수지베어링을 관통하게 설치되는 것이다.
기술분야
본 발명은 컨베이어 상의 물체를 픽업하여 다른 장소로 이동시키기 위한 델타로봇에 관한 것이다.
더 상세하게는 델타로봇의 Z축 회전을 지지하는 중심축을 구성함에 있어 안정적인 신축구조 및 구조로 되어 있어서 제품의 신뢰도를 높일 수 있으며, 가벼운 소재로 만들어져 작동부하가 적으며, 습동 부위에 수지베어링을 적용함에 따라 무급유가 가능한 델타로봇에 관한 것이다.
종래 델타로봇의 전체 구성도
배경기술
델타로봇(또는 spider robot이라고도 함)은 컨베이어 상의 물체를 자체 감지기능에 의해 픽업(pick-up)하여 다른 컨베이어 또는 기타 장소로 이동시켜주는 지능형 로봇이다.
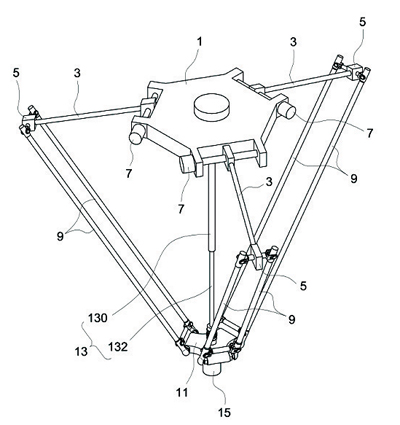
도면에 의하면, 종래 델타로봇은 판형의 베이스(1)와; 상기 베이스(1) 상에 볼죠인트(5)에 의해 상단이 연결되어 있으며, 구동모터(7)에 의해 각도가 조절되는 3개의 로봇 암(3)과; 상기 각 로봇 암(3)의 하단에 관절 연결되는 3개의 링크 암(9)과; 상기 3개의 링크암 하단에 결합되는 이펙터(11)와; 상기 베이스(1)와 이펙터(11) 사이를 연결하고 있으며, 신축이 가능한 중심축(13)과; 상기 이펙터(11)의 하부에 결합되는 그립퍼(15)로 구성된다.
상기한 종래의 델타로봇은 고정된 베이스(1)를 기점으로 하여 로봇암(3) 및 링크암(9)이 각기 관절운동을 하면서 그립퍼(15)를 상하 및 전후좌우로 이송시키는 동작을 하게 된다.
이 과정에서 상기 중심축(13)은 베이스(1)와 이펙터(11)의 간격변화에 상응하게 신축 및 회전되면서 베이스(1)에 대해 이펙터(11)를 안정적으로 지지해주는 역할을 한다.
그러나 종래의 델타로봇의 중심축은 다음과 같은 문제점이 있다. 종래 델타로봇의 중심축(13)은 두 개의 축이 결합되어 이루어져 있는데, 베이스(1)에 결속된 상부 중심축(130)과 이펙터(11)에 결속된 하부 중심축(132)이 상호 세레이션 결합되어 있다.
다시 말해서, 상기 상부 중심축(130)의 하단 내부에는 암 세레이션(131)이 형성되어 있고, 하부 중심축(132)의 상단 외부에는 수 세레이션(133)이 형성되어 있어서 상부 중심축(130)의 암 세레이션(131)에 하부 중심축(132)의 수 세레이션(133)을 슬라이딩 취부하여 결속되어 있다.
따라서 수 세레이션(133)과 암 세레이션(131)의 상호 취합에 의해 상, 하부 중심축간의 길이방향 신축운동이 가능하면서도 회전운동이 가능하다.
하지만 종래의 중심축(13)은 수 세레이션(133)과 암 세레이션(131)을 가공하기 위한 가공과정이 어렵고, 이들 세레이션이 맞물려 돌아갈 때 이상소음이 발생하며, 장기적인 사용 시 세레이션의 마모로 인해 슬립현상이 발생하고, 세레이션 마찰을 줄이기 위해 정기적으로 윤활유를 주입해야 하는 번거로움도 있다.
또한, 종래의 중심축(13)은 일반 스틸재이기 때문에 고중량이다. 따라서 중심축(13)의 작동시 큰 부하가 발생하게 되어 로봇 자체에 무리를 주게 된다.
본 발명에 따른 델타로봇의 전체 구성도
효과
본 발명은 구성적으로 안정적인 신축구조 및 회전구조를 갖고 있어서 제품의 신뢰도를 높일 수 있고 가벼운 소재로 만들어져 있어서 장치의 작동부하를 줄일 수 있다.
또한, 축의 습동 부위에 수지베어링을 적용함에 따라 자체윤활이 가능하여 윤활유를 급유해야 했던 기존의 번거로움을 해소할 수 있고, 축의 표면을 탄소 코팅함에 따라 습동 부위의 내열성을 향상시킬 수 있다.







