
로봇용 독립 구동 모듈
※자료제공 : 특허청

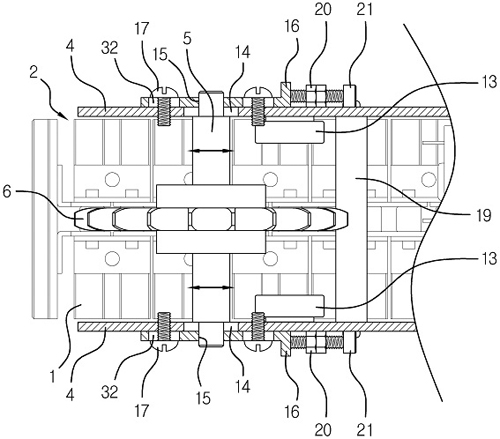
<도1> 본 발명에 의한 하나의 로봇용 독립 구동 모듈을 보인 사시도
대표도
주요부분 부호설명 : 1-블레이드, 2-무한궤도, 3-구동 수단, 4-측판, 5-고정축, 6-스프로켓, 7-체인, 8-베벨기어, 9-어테치먼트, 10-체결판, 11-베어링, 12-상측 롤러베어링, 13-하측 롤러베어링, 14-장공, 15-중심공, 16-텐션조절판, 17-고정나사, 18-고정볼트, 19-지지봉, 20-너트, 21-조정볼트, 23-적재판, 24-절곡판, 25-브라켓, 26-힌지, 27-조정볼트, 28-연결봉, 29-벨트, 30-구동기어, 31-회전축, 32-체결공, 33-유압실린더
- 등록번호 : 10-0835952
- 등록일자 : 2008년 6월 2일
- 출원번호 : 10-2008-0004754
- 출원일자 : 2008년 1월 16일
- 특허권자 : (주)엔티렉스
- 발명자 : 박경철
- 대리인 : 이재인
- 전체 청구항 수 : 총 6항
■ 요약
본 발명은 복수개를 조합하여 다용도로 활용 가능한 로봇용 독립 구동 모듈을 개시한다.
본 발명은 로봇용 독립 구동 모듈을 이용하여 필요에 상응한 규격으로 된 이동체를 제작할 수 있도록 함과 아울러, 이동로의 형태에 무관하게 주행 가능한 이동체를 제작할 수 있도록 한 것이다.
본 발명은 이를 위하여 모듈 둘레에서 회전하는 무한궤도와, 무한궤도의 양측을 밀폐시키는 두개의 측판과, 두개의 측판 사이를 연결하는 지지봉과, 측판 사이 공간에 설치되어 무한궤도에 회전 동력을 제공하기 위한 감속기 및 모터로 구성된 구동 수단으로 구성하여서 된 것이다.
이에 따라, 본 발명은 사용자가 필요에 따른 규격으로 브라켓을 제작하여 체결하는 것만으로 원하는 규격의 이동체를 제작할 수 있게 되고, 동일한 로봇용 독립 구동 모듈을 대량 생산하여 제공할 수 있으므로 제작비용을 크게 낮추어 염가로 제공할 수 있게 되는 등의 효과가 있다.
■ 배경기술
종래에도 주행 가능한 로봇용 구동 모듈을 구현하기 위한 대표적인 형태로 대한민국 실용등록 431193호(고안의 명칭: 쓰레기 배출관 청소용 로봇 ; 이하 ‘인용발명’이라 함)가 제안된 바 있다.
이러한 형태의 구동 모듈은 감속기가 내장된 두 개의 모터가 각각의 회전축을 회동시키고, 회전축에는 타측 종동 회전축을 체인으로 연결하여 회동시키며, 회전축에는 각각 회전휠이 고정되어 있는 구조로 되어 있고, 이들은 하나의 몸체에 일체화하여 설치한 것이다.
그러므로 이러한 인용발명은 전, 후방 회전휠이 두 개의 모터에 의하여 각각 회전되는 것이며, 모터에 내장된 감속기에 의하여 강한 토크를 갖게 되는 것이기는 하나, 하나의 규격화된 몸체에 일체로 내장된 것이어서 대부분의 경우 회전휠 사이의 간격이 부적합하여 용도에 따라 필요한 규격으로 몸체를 제작하여야 하는 것이므로, 대량 생산할 수 없게 되어 제작비용 절감이 어렵게 되는 문제점이 있는 것이다.
아울러, 대부분의 도시에는 노후화된 상수관로나 하수관로가 대단히 많으며, 이러한 협소하고 길이가 매우 긴 관로에는 사람을 투입할 수 없는 경우가 대부분이므로 로봇을 투입할 필요가 있으나, 이러한 관로 자체가 원형단면으로 되어 있어서 로봇의 주행이 어렵게 되는 것이다.
또한, 사선상으로 된 관로의 경우에도 일반적인 형태의 로봇으로는 주행이 어렵게 되는 것이어서 관로의 형태에 관계없이 주행 가능한 로봇의 출현이 절실히 요청되고 있다.
<도2> 무한궤도의 구조를 보인 횡단면도
■ 발명이 해결하고자 하는 과제
본 발명의 제 1목적은 이러한 문제점을 해결하기 위하여 로봇용 독립 구동 모듈을 이용하여 필요에 상응한 규격으로 된 이동체를 제작할 수 있는 로봇용 독립 구동 모듈을 제공함에 있다.
본 발명의 제 2목적은 이동로의 형태에 무관하게 주행 가능한 이동체를 제작할 수 있는 로봇용 독립 구동 모듈을 제공함에 있다.
■ 과제 해결수단
본 발명은 이러한 목적을 달성하기 위하여 모듈 둘레에서 회전하는 무한궤도와, 무한궤도의 양측을 밀폐시키는 두개의 측판과, 두개의 측판 사이를 연결하는 지지봉과 측판 사이 공간에 설치되어 무한궤도에 회전 동력을 제공하기 위한 감속기 및 모터로 구성된 구동 수단으로 구성하여서 된 로봇용 독립 구동 모듈을 제안한다.

<도3> 본 발명에 의한 로봇용 독립 구동 모듈의 구조를 보인 종단면도
■ 발명의 효과
이에 따라, 본 발명은 사용자가 필요에 따른 규격으로 브라켓을 제작하여 체결함으로써 원하는 규격의 이동체를 제작할 수 있게 되는 것이므로, 동일구조, 동일 규격의 로봇용 독립 구동 모듈을 대량 생산하여 제공할 수 있으므로, 제작비용을 크게 낮추어 염가로 제공할 수 있게 되는 효과가 있다.
뿐만 아니라, 본 발명에 의한 로봇용 독립 구동 모듈은 원하는 이동체 폭에 상응하는 적정폭을 갖는 브라켓으로 연결하는 것만으로 이동체의 폭을 원하는 규격으로 할 수 있으므로, 용도에 따라 최적화된 규격의 이동체를 용이하게 제작할 수 있게 되는 것이다.
아울러, 본 발명은 2개의 로봇용 독립 구동 모듈을 브라켓으로 연결하되, 브라켓 양측을 사선상으로 절곡하여 이에 고정되는 양측 모듈이 선정된 이동로의 내면과 접하도록 체결하면 원형 관로 또는 사선상으로 된 이동로 등 일반 로봇으로는 주행 불가능한 각종 형태의 이동로에서 주행 가능한 이동체를 제작할 수 있으며, 이에 따라, 작은 직경의 상, 하수 관로 등 종전에는 로봇이 투입이 불가능하던 각종 관로의 탐사가 가능하게 되는 유용한 효과가 있다.






