
오랫동안 기다려온 새로운 로봇비전, 저비용·고성능의 획기적인 “iVY system”
사용자의 요구에 부합하지 않는 산업용 로봇은 아무리 신기술이 집약되어 있더라도 작업의 효율성을 높이는 데 일조하지 못할 뿐만 아니라 오히려 생산성을 떨어트린다.
따라서 사용자가 원하는 용도와 로봇의 기능이 일치될 때에야 비로소 로봇의 역할을 다 한다고 할 수 있다.
야마하가 제시하는 로봇비전, iVY 시스템은 이런 사용자의 요구를 최대한 만족시키기 위해 태어난 시스템이다.
iVY 시스템은 야마하 로봇 컨트롤러 RCX240에 적합한 플러그인 보드 사양을 갖추고 로봇 제어, 비전 처리, 조명 컨트롤을 포함한 모든 기능을 통합했다.
또한 광범위한 시스템과 작업환경에서 패턴을 일치시키는 새로운 세대의 검색 기능을 포함하고 있으며 강력한 PC용 소프트웨어가 calibration, 데이터 입력, 기억장치 태스크 등의 작업을 완벽하게 지원한다.
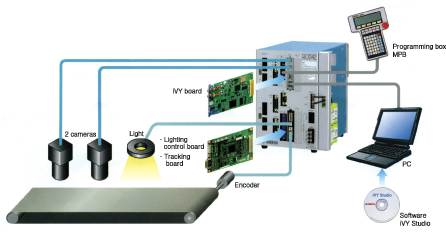
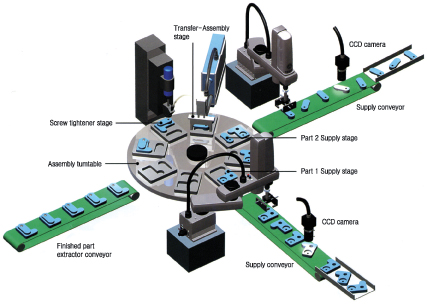
<그림1> iVY system layout
|
명령어 |
기능 |
명령어 |
기능 |
|
VCAPTURE |
카메라로부터 이미지를 읽어들인다 |
VGETCNT |
지정된 품목의 개수를 카운트 한다. |
|
VSEARCH |
지정된 품목을 검색한다. |
VGETPOS |
위치 자료를 얻는다. |
|
VSERCHM |
메모리 이미지에서 지정된 품목을 찾는다. |
VGETTIME |
실행된 검색 명령에 걸린 시간정보를 취득한다. |
|
VMONITOR |
모니터 모드 ON/OFF |
VGETSCR |
검출한 품목의 pass/fail정보를 취득한다. |
|
VSELCAM |
카메라 전원 |
VSAVEIMG |
BMP 포맷으로 이미지를 보관한다. |
<표1> 타입별 로봇 비전 명령어 (프로그래밍 박스를 사용하여 직접 입력 가능)
|
1단계 |
2단계 |
3단계 |
|
iVY Studio에 두개의 기준 마크를 등록한다. |
2개의 마크를 카메라에 적용한다. |
로봇에 2개의 마크를 티칭한다. |
<표2> Calibration 작업 단계
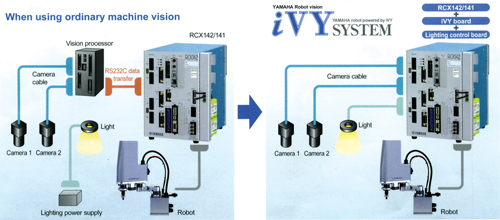
<그림2> 시판되는 범용 비전 시스템을 사용한 경우/ ivy 시스템을 사용한경우
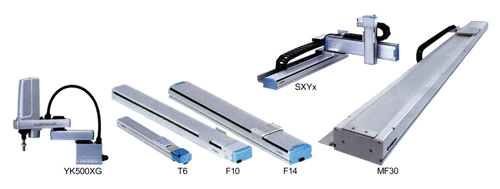
<그림3> YAMAHA robot lineup
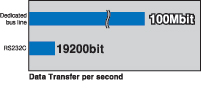
<그림4> 초당 data 전송률
작업의 효율성을 극대화시키는 “iVY system”만의 차별화 기술
·새로운 세대의 마지막 검색 엔진
현재의 설비에 사용되는 머신비전들은 그레이 서치방식으로 분진이나 노치, 조명 등에 쉽게 영향을 받고 어플리케이션 할 수 있는 작업 환경이나 설치 장소에 한계를 가졌었다.
그러나 iVY 시스템은 구성요소 부분의 윤곽을 이용해서 탐색하는 새로운 세대의 검색 엔진을 탑재하였다. 이 윤곽 검색은 외부 조건에 강한 저항력을 갖고 있기 때문에 머신비전 작업의 전체 범위에 적용 할 수 있다.
·매우 간단한 Calibration
Calibration은 카메라 좌표에 로봇 좌표를 일치시키는 작업이다.
기존의 로봇비전 시스템은 단지 셋업을 하는 공정에도 막대한 양의 작업 단계를 거쳐 “머신 비전 로봇”을 결합시켰지만 iVY 시스템은 프로그래밍 박스의 대화 형식 명령어로 짧은 시간 내에 작업을 마치게 해준다.
·통일화된 로봇 프로그램 조작
다른 머신 비전들은 로봇 좌표 데이터와 비전 컨트롤러의 포맷이 달라, 좌표를 변환시키기 위해 로봇 컨트롤러 내에 좌표를 변환하는 프로그램을 탑재하지 않으면 안 됐다.
그러나 iVY 시스템은 로봇 컨트롤러 상에서 간편하게 한 번의 작업으로 끝낼 수 있다. 카메라 제어와 조명 컨트롤이 컨트롤러의 간단한조작으로 가능하므로, I/O 입출력 신호의 교환이 완전히 필요 없게 되었다.
·전용 버스 라인으로 고속 접속
보통의 머신비전이 설비 후 속도가 느려지는 것과 달리 iVY 시스템은 로봇 컨트롤러의 CPU에 직접 버스 라인을 접속한다.
이로 인해 시판되고 있는 시리얼 전송보다 약 5,000배 높은 데이터 전송 속도를 실현하였다.
따라서 빠른 속도의 공정처리가 요구되는 컨베이어 트래킹 작업도 손쉽게 할 수 있다.
·컨베이어 트래킹 기능
단지 트래킹 보드를 추가하는 것으로 컨베이어 트래킹을 할 수 있다.
컨베이어에 설치한 엔코더의 펄스(AB상) 신호를 옵션의 트래킹 보드에 로드시키면, 흐르는 작업물의 위치를 계속하여 인식하므로 컨베이어를 멈추지 않고 작업물을 픽업할 수 있다.
또 어플리케이션에 따라 카메라와 비전 보드 없이 저가의 트래킹 시스템도 구축이 가능하다.
·다양한 야마하 로봇 라인, 그 안에서의 자유로운 선택
단축 로봇 FLIP-X 시리즈, 리니어 로봇 PHASER 시리즈, 직교 로봇 XY-X 시리즈, SCARA 로봇 YK-X 시리즈를 포함한 RCX 시리즈 컨트롤러에 연결 가능한 야마하 로봇 제품의 범위 내에서 어떤 모델이든 사용 가능하다. 사용자의 요구에 딱 맞는 이상적인 모델을 선택, 저렴한 비용으로 다재다능한 로봇 비전 시스템을 설치할 수 있다.
|
품명 |
iVY 시스템 | |
|
기본사양 |
픽셀 |
640(H) * 480(V) (300,000 pixels, VGA) |
|
설정 기능 품목 수 |
40품목 | |
|
접속 가능 카메라 수 |
최대 2대 - 2대의 카메라를 접속할 경우 동일 기종의 카메라일 것 | |
|
카메라 타입 |
2배속 대응 아날로그 카메라 | |
|
메모리 |
128MB SDRAM, 256MB miniSD card | |
|
외부 I/F |
Ethernet (100BASE-TX) | |
|
검색방법(Search Method) |
Edge search(Correlative edge filter, Sobel filter) | |
|
image input |
Trigger mode |
S/W trigger, H/W trigger, 카메라 내부 동기 |
|
외부 trigger input |
2점 | |
|
기능 |
검색기능 |
위치보정, 포인트 데이터 자동 등록 |
|
ID 인식(대응예정) |
QR-Code[Model 2], DataMatrix | |
|
Options |
컨배이어 트래킹 - 트래킹 보드 필요 | |
<표3> iVY 시스템 기본 사양

<그림5-1> SMALL PART PALLETIZNG - 다음공정의 자동화 장비를 위해 부품을 팔레타이징 한다.
<그림5-2> LOADING PARTS INTO ASSEMBLER MACHINE - 정렬되어 있지 않은 부품을 자동조립기에 투입한다.







