
사진. 한국AI·로봇산업협회
휴머노이드, 모바일 머니퓰레이터 등 생활 속 다양한 로봇들이 성능과 제어 정확도를 객관적으로 평가받을 수 있게 될 전망이다.
한국AI·로봇산업협회와 한국전자기술연구원은 국내 로봇 산업의 경쟁력 강화와 로봇 적용 범위 확대 대응을 위해 로봇 핵심 구성 요소의 성능과 작업 제어에 관한 ‘성능평가 표준’개발에 박차를 가하고 있다고 밝혔다.
최근 로봇 산업이 단순 반복 공정을 넘어 휴머노이드와 전문 서비스 로봇으로 진화함에 따라, 로봇의 정밀한 조작 능력과 복잡한 환경에서의 적응력을 객관적으로 평가할 수 있는 기준 마련이 시급한 상황이다. 이에 협회와 연구원은 핵심 표준의 제정을 추진 중이다.
개발 중인 표준은 총 2종으로 ‘로봇 손-제2부 : 물체 쥠 성능시험 방법’ 표준은 로봇분야 단체표준(KOROS) 제정이 완료되어 국가표준(KS) 제정을 진행 중이며, ‘로봇 시스템의 와이어하네스 조작 성능평가 방법’ 표준은 KOROS 제정 진행 중이다.
단체 표준으로 제정 완료된 ‘로봇 손 – 제2부 : 쥠 성능 시험방법 표준’은 손가락 2개 이상을 가진 로봇 손에 대해 ▲가변 또는 비정형한 물체에 대한 쥠 성능평가 방법과 ▲쥐는 힘 제어 정확도 시험 방법으로 구성되어 있으며, 시험 환경과 시험 장치, 시험 절차 및 결과보고서 작성 방법 등이 포함된다. 주요 평가 목표가 서비스용 로봇 시스템이라는 점에서 기존 산업용 로봇 중심의 표준과는 차별성이 있다.
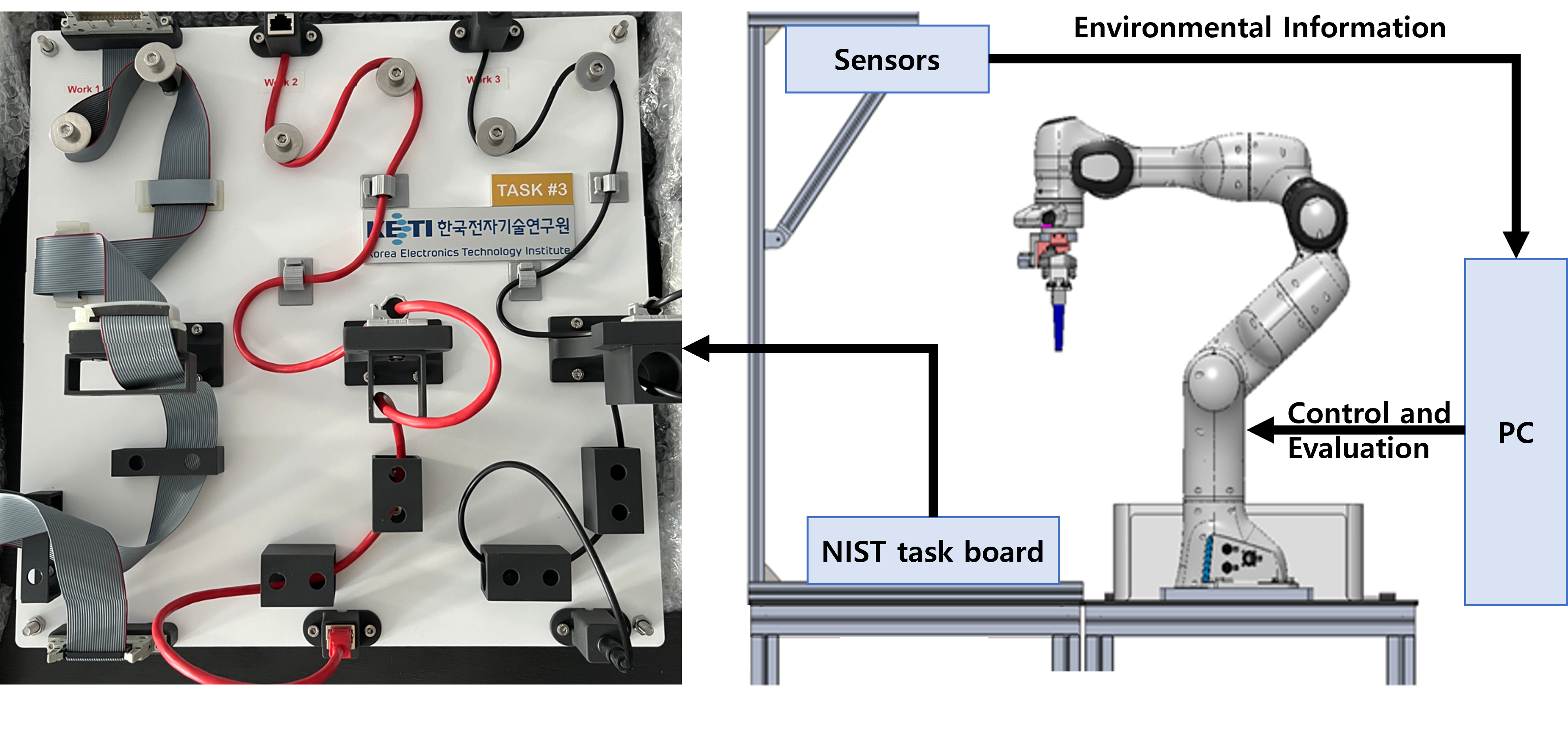
단체 표준 제정을 추진 중인 표준인 ‘로봇 시스템의 와이어하네스 조작 성능평가 방법’은 리테이너와 커넥터와 구성된 태스크 보드 상에서 와이어하네스를 지정된 경로에 따라 삽입 및 결속하여 로봇의 유연체조작 성능을 평가한다. 기존의 강성체만 다루던 제조용 로봇 시스템의 활용 범위가 다루기 까다로운 대상물의 조작까지 확대되는 시장 상황을 고려하여 개발 중이다.
최근 피지컬 AI가 제조업, 물류, 의료, 농업, 자율주행 등 전 산업을 아우르는 차세대 먹거리로 급부상하면서, 휴머노이드 로봇과 그의 핵심 부품인 로봇 손과 같은 엔드이펙터(End-effector)에 대한 중요성도 강조되고 있고, 와이어하네스 조립, 체결 등 기존 제조 현장에서의 유연체 조작으로 도입 범위가 확대되는 추세를 고려하였다. 이번 표준이 제정되면, 로봇 손 개발 업체와 시스템 통합(SI) 업체들은 일관된 기준에 따라 성능 평가 결과를 확보할 수 있게 되어, 로봇 손과 관련 로봇 시스템의 신뢰도 제고에 기여할 것으로 전망된다.
이번 표준화는 한국AI·로봇산업협회과 한국전자기술연구원이 함께 연구 성과를 기반으로 표준 제정을 추진 중으로 한국전자기술연구원의 박종범 수석연구원은 “비정형 환경에서의 대응 능력은 로봇의 현실화의 최대 난제 중 하나로 연구원의 기술 역량을 집약하여 실제 산업 현장, 서비스 현장에서 체감할 수 있는 정밀한 성능평가 체계를 구축하겠다”고 밝혔다.
한국AI로봇산업협회 이영민 센터장 또한 “로봇의 성능을 평가하는 표준은 로봇 상용화를 위한 기반 구축에 해당한다”며 “이번 표준 개발이 휴머노이드 로봇을 비롯한 모든 로봇의 활용 범위가 확대와 글로벌 시장 선점에 중요한 발판이 될 것”이라고 덧붙였다.
향후 협회와 KETI는 해당 표준안을 KS 표준 제정함은 물론, 글로벌 표준 주도권 확보에도 힘쓸 예정이다.
이번 연구는 산업통상부와 한국산업기술기획평가원의 ‘로봇산업핵심기술개발 사업’과 한국산업기술진흥원의 ‘국제공동기술개발사업’의 지원을 받아 수행됐다.








