
이유봇(EYOUBOT)의 일체형 조인트 모듈과 FPGA(Field-Programmable Gate Array) 제어 솔루션은 휴머노이드 로봇 및 협동로봇 산업에서 정밀성과 신속성을 동시에 달성하는 핵심 기술로 주목된다. 모터, 브레이크, 하모닉 감속기, 듀얼 엔코더가 통합된 모듈 설계는 설치·유지보수를 간소화하고, FPGA 기반 고속 제어는 외란 대응과 반복 정밀도를 극대화한다. PH 시리즈 모듈은 다양한 페이로드와 자유도에 맞춰 최적화되며, 자동차, 패킹, 의료 등 산업 현장에서 정밀 조립과 고효율 작업을 지원한다.

FPGA 기반 조인트 모듈 / 사진. 모터114
휴머노이드 로봇용 일체형 조인트 모듈
이유봇(EYOUBOT)의 일체형 조인트 모듈(EYOU Joint Module)과 FPGA(Field-Programmable Gate Array) 기반 제어 솔루션은 휴머노이드 로봇과 협동로봇 분야에서 정밀 제어의 새로운 기준을 제시하고 있다. 이 기술은 고토크, 저소음, 고정밀 위치 제어를 구현한 조인트 모듈과 FPGA 제어 기술을 결합함으로써 산업 자동화, 의료, 자동차, 패킹 등 다양한 산업 분야에서 효율성과 신뢰성을 동시에 향상시킨다.
이유봇은 휴머노이드 로봇 액추에이터 중 모터 드라이버용 FPGA 칩을 자체 개발·제작하는 유일한 공급업체로, 경쟁사들이 MCU 기반 솔루션을 사용하는 것과 달리 FPGA 기반 고속 제어가 가능하다. 또한, 하모닉 감속기 분야에서 세계적 평판을 가진 LeaderDrive와 전략적 파트너십을 체결했으며, 프레임리스 모터 역시 일본산 신뢰성 높은 제품을 적용했다.
휴머노이드 로봇과 협동로봇 산업은 정밀성과 신속성을 동시에 요구하며, 외란 대응 능력과 반복 정밀도가 중요한 과제로 꼽힌다. 이유봇의 솔루션은 이러한 요구를 충족시키며, 기존 MCU 기반 제어의 한계를 극복한다. 이유봇의 일체형 조인트 모듈은 애지봇(Agibot), 갤봇(GALBOT·Galaxy General Robot), 유비테크(Ubtech) 등 20여개 사의 글로벌 휴머노이드 로봇에 적용되고 있으며, 모터, 브레이크, 하모닉 감속기, 드라이브, 듀얼 엔코더가 하나의 모듈에 통합된 구조가 특징이다. 이러한 단일 모듈 설계는 설치와 유지보수를 간편하게 하고, 배선을 단순화하며, 전기적 노이즈 저감에도 효과적이다.
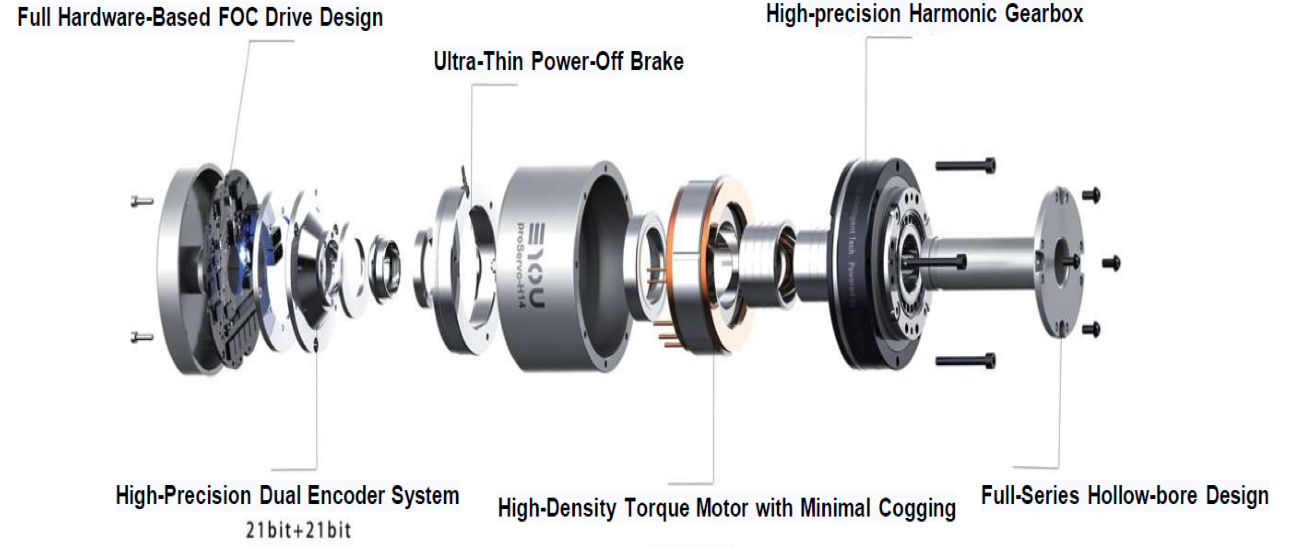
조인트 모듈의 핵심 구성 요소는 FPGA 기반 FOC(Field Oriented Control) 드라이버, 고정밀 하모닉 감속기, 고토크 프레임리스 모터, 듀얼 마그네틱 앱솔루트 엔코더, 그리고 선택형 전자 브레이크로 구성된다.
FPGA 기반 드라이버는 고정밀 토크 제어를 가능하게 하고, 듀얼 엔코더는 보다 안전하고 정확한 위치 제어를 보장한다. 하모닉 감속기는 저소음과 저백래시를 구현하며, 고토크 밀도의 프레임리스 모터는 로봇 팔의 민첩성과 출력 효율을 극대화한다. 엔코더는 19bit 분해능을 가진 듀얼 마그네틱 앱솔루트 구조로 배터리가 필요 없으며, 전력 차단 시 즉시 정지 가능한 무여자형 전자 브레이크는 안전성을 확보한다. 통신 제어는 EtherCAT과 CANopen을 지원한다.
정밀한 구동의 FPGA
조인트 모듈 구상도 / 사진. 모터114
FPGA는 재프로그래밍 가능한 디지털 집적 회로로, CPU처럼 명령어를 순차적으로 처리하지 않고 논리 회로 자체를 구성해 실시간 제어가 가능하다. 이를 통해 하드웨어 기반 FOC 회로와 디지털 파라미터 튜닝이 가능하며, 고토크와 초고속 응답으로 정밀 제어를 구현할 수 있다.
이유봇 조인트 모듈은 제어 알고리즘을 FPGA에 구현해 외란 대응 능력과 반복 정밀도를 강화했다. 전류 루프, 속도 루프, 위치 루프 등 모든 제어 루프가 하드웨어 수준에서 동작하며, 비선형 시스템에서도 안정적이고 정밀한 동작을 구현한다.
조인트 모듈과 산업 사례
이유봇의 PH 시리즈 조인트 모듈은 하모닉 감속기와 내장형 모터를 탑재한 휴머노이드 로봇용 모듈로, 부위별 적용 환경에 따라 다양한 모델이 구성돼 있다.

PH시리즈 / 사진. 모터114
PH08-101은 주로 목 부위에 적용되며, 약 0.244㎏의 페이로드를 지원한다. PH11-101은 팔꿈치 부위에 적용돼 0.508㎏의 하중을 처리할 수 있다. 또한 PH14B-101은 전완, PH17B-101은 팔꿈치·전완 부위에 사용되며, 각각 0.976㎏과 3.05㎏의 페이로드를 제공한다.
상위 모델인 PH20B-121과 PH25B-121은 각각 팔꿈치·어깨 및 어깨 부위에 사용되며, 6.1㎏과 8.57㎏의 하중을 감당한다.
조인트 모듈의 선택은 로봇의 팔 길이, 페이로드, 자유도 등에 따라 최적화된다. 예를 들어 팔 길이가 80㎝ 미만이고 페이로드가 1㎏인 6자유도 로봇의 경우, PH08 모듈 3개와 PH11 모듈 3개를 조합해 구성한다.
특히 이유봇의 PH 시리즈를 적용한 애지봇휴머노이드 로봇은 돌출이 없는 슬리브 일체형 장착 구조를 통해 모듈을 결합할 수 있다. 이 구조는 내부 공간 효율성을 높이는 동시에 외관의 미관까지 개선한다.
이유봇 조인트 모듈은 산업 자동화 및 서비스 로봇 분야 전반에 폭넓게 적용될 수 있다. 자동차 조립 라인이나 전자부품 생산 라인에서는 볼트 체결, PCB 설치, 정밀 부품 조립 등 정확한 위치 제어가 요구되는 공정에 적합하다. 센서 및 제어 시스템과의 통합을 통해 소량·다품종 생산 체계에서도 유연하게 대응할 수 있다.
자동차 산업에서는 6축 협동로봇 팔 형태로 구성돼 용접, 페인팅, 자재 취급 등의 작업을 수행하며, 엔드 이펙터구동을 통해 반복적인 고정밀 작업을 지원한다.
패킹 및 팔레타이징 로봇에서는 제품 밀봉, 라벨링, 박스 포장 과정에서 필요한 힘 제어 및 스트로 최적화를 실현할 수 있다. 또한 팔레타이징 로봇은 실시간으로 최적 적재 높이와 위치를 계산해 자동 정렬 작업을 수행한다.
의료 및 웨어러블 분야에서도 정밀 모션 제어 기술이 활용된다. 예를 들어 외골격형 재활 보조장치. 근력 보조형 웨어러블 기기 등 사람의 움직임을 보조하는 장비에 탑재돼 안정성과 반응성을 확보한다.
한편, 이유봇은 고토크 플래너터리 감속기를 탑재한 PP 시리즈 조인트 모듈도 제공한다. 이 시리즈는 주로 협동로봇 및 휴머노이드 로봇 하체부에 사용되며, 기계적 강성과 내구성을 동시에 확보했다. PP 시리즈는 CAN 2.0 통신 버스, 완전 하드웨어 기반 FOC 드라이브, 4점 접촉 베어링, 고정밀 플래너터리 감속기 등의 기술이 적용돼 있다.

PP시리즈 / 사진. 모터114
모듈의 외경은 Ø32~52㎜, 길이는 33.4~82㎜ 범위이며, 무게는 86g에서 521g까지 다양하다. 기어비는 6~36 사이에서 선택할 수 있으며, 전력은 35~72W, 속도는 50rpm, 토크는 0.2~10Nm, 피크 토크는 0.48~18Nm까지 제공된다.
또한 휴머노이드 로봇의 하체 구동을 위한 드라이버 일체형 리니어 모터 RL50도 개발됐다. RL50은 리버스 볼스크류(Reverse Ball Screw) 방식을 적용했으며, 수명은 6,200시간 이상이다. 동작 온도 범위는 -10~50℃, 소음은 1m 기준 65㏈ 이하로 관리된다.
18비트 듀얼 마그네틱 엔코더를 통해 정밀한 위치 피드백을 제공하며, 응답 속도는 0.5ms 이하로 빠르다. CE 및 UL 인증을 획득했으며, 통신 프로토콜은 CAN FD를 사용한다.
주요 사양은 축 길이 125㎜, 직경 32㎜, 스트로크 35㎜, 리드 2㎜, 무게 25㎏, 최대 속도 38.1㎜/s, 정격 추진력 200N, 피크 추진력 500N, 위치 반복 정밀도 ±0.01㎜ 수준이다.
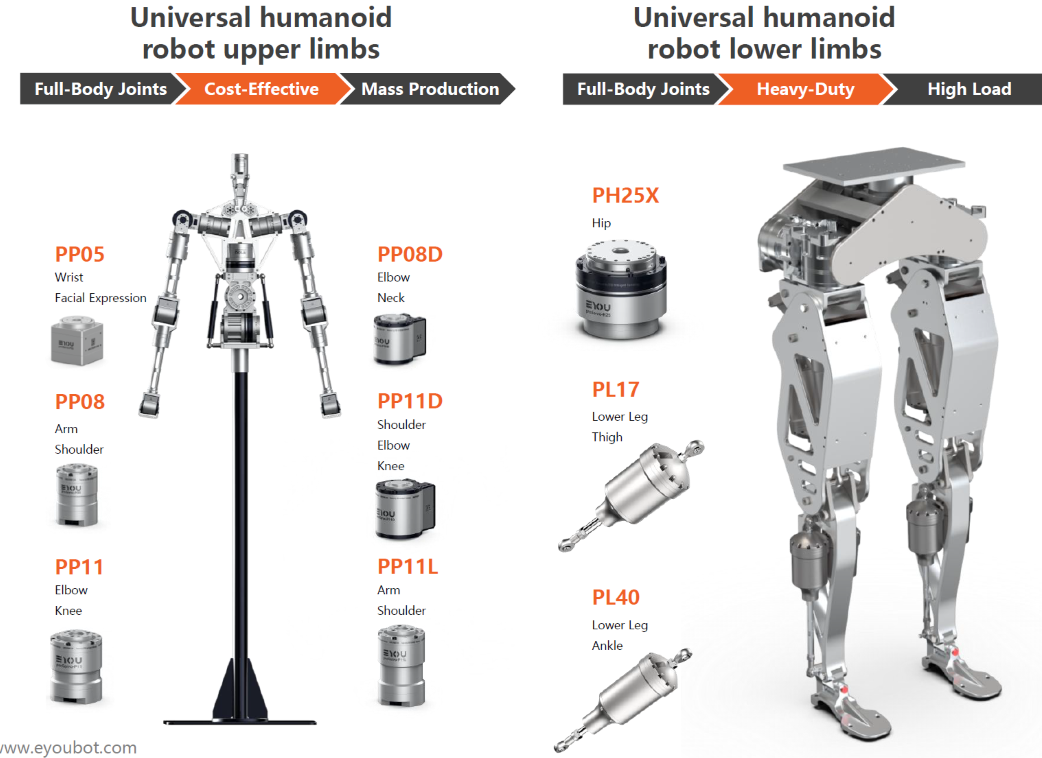
이유봇은 상·하체 모듈별로 최적화된 구성도 제시하고 있다. 상체 구성은 보급형 전신 조인트 기반 유니버설 휴머노이드 로봇에 적합하며, 손목 표정 제어에는 PP05, 팔·어깨에는 PP08 및 PP11L, 팔꿈치와 무릎에는 PP11, 목에는 PP08D, 어깨·팔꿈치·무릎에는 PP11D가 사용된다.
하체 구성은 고하중·고강성 기반의 산업형 휴머노이드 로봇에 최적화돼 있으며, 엉덩이에는 PH25X, 허벅지에는 PL17, 발목에는 PL40이 적용된다.
이처럼 이유봇의 조인트 모듈 시리즈는 상체의 유연한 동작부터 하체의 고하중 구동까지 모두 커버하는 구조로 설계돼 있다. 이를 통해 로봇 제조사는 다양한 용도와 크기의 휴머노이드 로봇 및 협동로봇 플랫폼을 손쉽게 개발할 수 있으며, 표준화된 모듈 기반으로 양산성, 유지보수성, 확장성을 동시에 확보할 수 있다.
휴머노이드 로봇 상하체 구상도 / 사진. 모터114
FPGA와 MCU 기반 제어 솔루션 비교
이유봇 조인트 모듈은 FPGA 기반 제어 솔루션을 채택해 기존 MCU 기반 솔루션 대비 우수한 성능을 보인다. MCU는 PID 기반 단순 제어 알고리즘을 사용하므로 비선형 부하에서 성능 한계가 존재하지만, FPGA는 실시간 외란 추정과 보상이 가능하며, 비선형 시스템에도 안정적 제어가 가능하다. FPGA는 하드웨어 기반 병렬 연산을 활용해 전류 루프 1MHz, PWM 최대 64㎑ 제어가 가능하지만, MCU는 20㎑ 제약으로 상대적으로 느린 토크 응답과 낮은 제어 대역폭을 가진다.
모션 제어 알고리즘 면에서도 차이가 나타난다. MCU는 단순 PID 제어 중심으로 구현이 가능하지만 외란과 비선형 부하 대응 능력이 제한된다. 반면 FPGA 복잡한 시스템을 적분 연쇄 구조로 단순화하고, 확장 상태 관측기(Extended State Observer)를 통해 외란과 시스템 상태를 실시간 추정하며, 비선형 상태 오차 피드백 제어(Nonlinear State Error Feedback)를 사용해 빠르고 정밀한 제어를 수행한다. 또한 비선형 추적 미분기(Tracking Differentiator)로 부드러운 위치 추종과 고속 응답이 가능하며, 파라미터 오토 튜닝 기능으로 제어 파라미터를 자동 최적화한다.
성능 비교에서 전류 루프(Current Loop)는 MCU 20㎑ 대비 FPGA 1㎒로 빠른 토크 응답과 낮은 지연을 제공하며, 속도 지터(Speed Jitter)는 MCU ±0.2% 대비 FPGA ±0.1%로 저속 진동 최소화가 가능하다. 모터 효율은 80~90%인 MCU 대비 FPGA가 95%로 우수해 배터리 효율이 증가하고, 대량 생산 비용 역시 100,000대 이상 생산 시 단가를 유지하면서 고품질을 보장한다.
이유봇은 FPGA를 통해 저속 진동 최소화, 과열 방지, 외란 대응력을 향상시켰으며, 국내 통합형 조인트 모듈 제조사는 MCU 솔루션 의존도가 높아 기술 장벽이 존재한다.
정밀 제어와 산업 혁신
이유봇의 일체형 조인트 모듈과 FPGA 제어 솔루션은 휴머노이드 로봇과 협동로봇 분야에서 MCU 기반 제어 솔루션의 한계를 극복하고, 산업 자동화, 의료, 자동차, 패킹 등 다양한 분야에서 정밀성과 안정성을 동시에 달성한다. 고정밀 관절 모듈은 고토크, 저소음, 저백래시, 듀얼 엔코더, 선택형 브레이크를 제공하며, FPGA 제어는 빠른 전류 루프, 낮은 속도 진동, 높은 배터리 효율을 실현한다.
산업 응용 사례로는 정밀 조립, 패킹·팔레타이징, 외골격 의료 장비, 협동로봇 티칭 시스템 연계가 가능하다. 이유봇의 기술력은 휴머노이드 로봇의 인간 유사 동작 구현과 협동로봇의 정밀 경로 제어, 그리고 산업 현장의 생산 효율성을 동시에 높이는 혁신적 솔루션으로 평가된다. 향후 FPGA 기반 정밀 모션 제어는 글로벌 로봇 산업의 새로운 표준으로 자리매김할 전망이다.
필자

모터114 기술연구소 전용철 상무









