
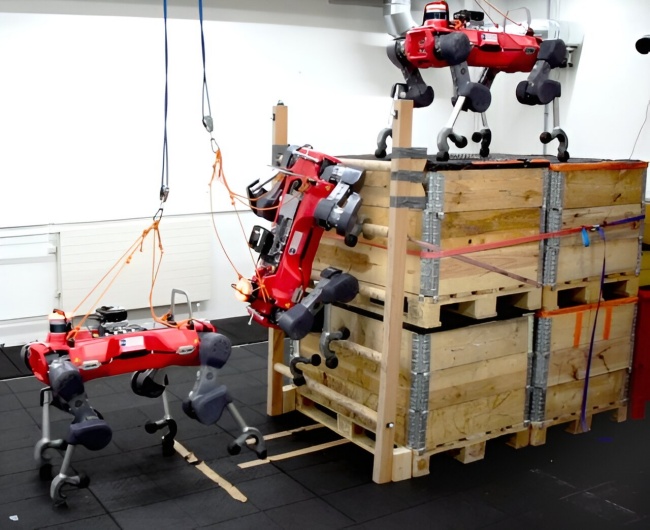
스위스 취리히 연방공대가 사다리를 자유자재로 오르는 사족보행기술을 개발했다 / 사진. ETH Zurich
스위스 취리히연방공대(ETH Zurich)는 로봇시스템즈랩(Robot Systems Lab) 연구팀이 사다리를 자유자재로 오르는 사족보행로봇 기술을 개발했다고 밝혔다.
연구팀은 “사족보행로봇이 산업 시설 점검 등 다양한 분야 활용에 투입되고 있으나, 산업용 시설에 산재하는 사다리 구조물을 통과하는 것에 효율적인 동작을 구현하지 못했다”라며 이번 연구 진행 배경을 설명했다. 해당 연구는 출판 전 논문 공개 사이트 ‘아카이브(arXiv)’에 게재됐다.
연구팀은 끝부분이 구부러져 있는 EOAT를 로봇 다리에 장착해 로봇이 사다리를 능숙하게 오르는 기술을 공개했다. EOAT는 로봇이 사다리를 오를 때 힘의 적절한 분산과 미끄러짐 방지에 도움을 준다.
또한, 연구팀은 ‘Privileged Teacher-Student Reinforcement Learning Approach’ 학습을 활용해 시뮬레이션 상에서 로봇을 학습했다. 로봇은 90% 확률의 사다리 오르기 성공률을 보였다.
연구팀 관계자는 “해당 기술을 통해 사족보행로봇이 안정적이고 더욱 빠른 속도로 사다리를 오를 수 있다는 사실을 확인했다”라며, “향후 카메라나 3D비전 등 외부 시스템 활용 방식보다 더욱 뛰어난 환경 인식 기술 개발을 진행할 것”이라고 전했다.










