
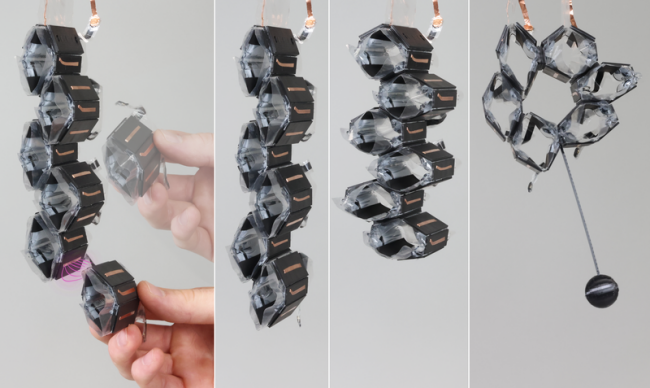
육각형 로봇 모듈 / 사진. MPI-IS
독일 막스플랑크 지능시스템연구소(Max Planck Institute for Intelligent Systems, 이하 MPI-IS)는 최근 레고처럼 빠르게 조립 가능해 다양한 기능에 따라 재구성이 가능한 육각형 로봇 모듈을 개발했다고 밝혔다. 이번 연구는 MPI-IS 내 Christoph Keplinger가 이끄는 로봇·소재 부서 연구팀이 개발했으며, 로봇 전물 학술지 사이언스 로보틱스에 ‘빠르게 재구성 가능한 고속 로봇을 위한 육각형 전기 유얍 모듈(Hexagonal electrohydraulic modules for rapidly reconfigurable high-speed robots)’ 논문명으로 게재됐다.
이 로봇은 자석이 내장된 육각형 외골격과 부드러운 인공근육으로 구성돼 빠른 기계적·전기적 상호작용이 가능하다. 외골격은 가볍고 튼튼한 유리섬유로 구성됐으며, 육각형 내부 관절은 유압 증폭 자가 치유 정전기(HASEL) 인공근육에 의해 구동된다. 모듈에 고전압을 인가하면 근육이 활성화돼 육각형 관절이 회전하고 모양이 길고 좁은 것에서 넓고 평평한 것으로 변형된다.
본 연구 출판문 공동 1저자인 콜로라도 볼더 대학 Ellen Lumley 방문 연구원은 “이 같은 방식으로 소프트 및 리지드 구성 요소를 결합하면 높은 스트로크와 속도 구현이 가능하다”라며, “여러 모듈을 연결하면 새로운 로봇 형상을 만들 수 있고, 변화하는 요구에 맞게 재활용 가능하다”라고 말했다.
MPI-IS 연구팀은 해당 로봇을 조립하는 영상을 공개했다. 영상에서 연구팀은 모듈로 만들 수 있는 다양한 형태를 보여준다.
본 연구의 또다른 1저자인 Zachary Yoder 연구원은 “일반적인 상황에서 재구성이 가능한 기능을 가지고 있는 로봇을 개발하는 것은 매우 효율적이며, 지속 가능한 설계 옵션을 제시한다. 다섯 가지의 다른 업무 수행을 위해 5개의 로봇을 구매하는 대신 동일한 구성요소를 사용해 여러 가지 로봇을 제작할 수 있다”라고 설명하며, “재구성 가능한 모듈을 통해 로봇은 필요에 따라 재배치돼 특수 시스템 보다 더 많은 기능을 제공하며, 이는 자원이 제한된 환경에 큰 도움이 될 것이라 기대한다”라고 전했다.










