
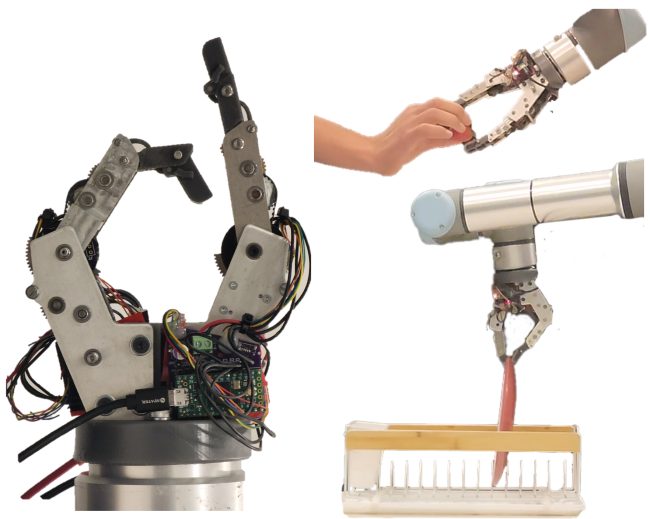
연구팀이 개발한 그리퍼 / 사진. ArXiV
미국 매사추세츠 공과대학교(Massachusetts Institute of Technology, 이하 MIT)는 임프로버블AI랩(Improbable AI Lab)과 협력해 30가지의 다양한 일상 업무를 수행할 수 있는 두 손가락 그리퍼를 개발했다고 밝혔다. 해당 그리퍼는 콤팩트한 크기에 접시, 종이와 같은 평평한 물체 및 과일 같은 비정형적인 물체를 자연스럽게 옮길 수 있다.
로봇이 엔드이펙터(End Effector)를 통해 인간의 손과 유사한 조작으로 작업을 수행하는 것은 로봇공학에서 오래된 과제이다. 연구팀은 인간과 유사한 작업 수행을 위해 통상적으로 사용되는 기성품 엑추에이터가 아닌, 직렬구조의 탄성력을 가진 액추에이터(Series-Elastic Actuator)를 사용했다. 또한, 인간의 손 크기, 형태, 유연성과 같은 일부 특성을 최대한 적용했으며, 가능한 콤팩트한 크기 구현을 위해 노력했다.
연구팀은 이번 연구를 출판 전 논문 공개 사이트 ’아카이브(arXiV)’에 게재했다. 이와 더불어 그리퍼 성능 평가를 위해 물건을 옮기는 픽 앤 플레이스 작업 등 다양한 실험을 진행한 영상을 공유했다.
언구팀 관계자는 “추후 범용화된 가정용 로봇 개발에 해당 기술을 적용할 수 있을 것으로 기대하고 있다”라고 전했다.










