
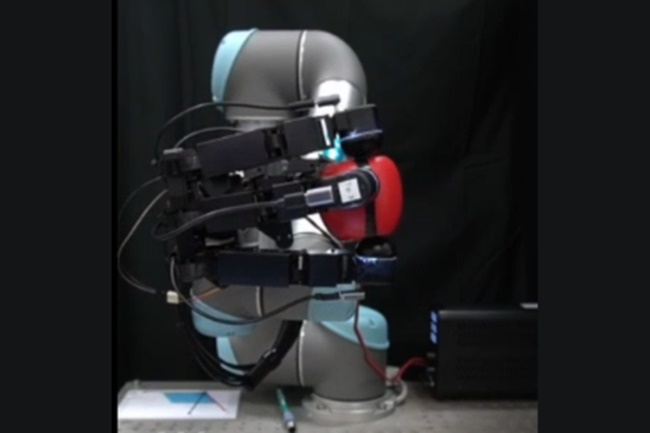
브리스톨 대학교가 개발한 인공 촉각이 적용된 로봇 손 / 사진. Unviersity of Bristol
영국 브리스톨 대학교(University of Bristol)은 로봇공학 및 인공지능(AI) 네이썬 레포라(Nathan Lepora) 교수가 이끄는 연구팀이 공과 장난감 등의 물체를 어떤 방향으로든 회전시킬 수 있는 인공 촉각이 적용된 로봇 손을 제작했다고 지난 27일(현지시각) 밝혔다. 해당 로봇은 인공 촉각이 적용된 네 개의 손가락으로 구성돼있으며, 손이 거꾸로 되어 있는 상황에서도 동일한 작업을 수행할 수 있다.
이미 지난 2019년 OpenAI는 로봇 손으로 인간과 같은 정교한 손동작을 선보였지만, 해당 로봇은 손으로 제어할 수 있는 거대 신경망 학습을 위해 19대의 카메라와 6,000개 이상의 CPU가 내장된 케이지가 사용됐으며, 상당한 비용이 필요했다. 브리스톨 대학은 레포라 교수 연구팀이 해당 로봇과 동일한 성능을 더 간단하고 경제적인 방법을 사용해 구현하기 위해 본 연구를 진행했다고 전했다.
레포라 교수는 이번 연구 성과에 대해 "스마트폰 카메라가 매우 축소돼 로봇 손가락에 탑재될 수 있게 된 덕분에 고해상도 촉각 센서 개발이 가능했다"라며, "이번 연구에 활용된 로봇의 손가락 끝은 인간 피부 구조를 모방한 3D 프린터로 제작한 메시 소재를 사용했다"라고 설명했다.
이어 그는, "이번 연구 성과를 바탕으로 향후 로봇 손을 활용해 픽앤플레이스, 회전 작업을 넘어 레고를 조립하는 등의 더욱 발전된 동작을 구현하는 것을 목표로 하고 있다"라고 설명했다.
해당 연구는 학술 논문 아카이브인 'arXiv'에 개재됐다.
한편, 브리스톨 대학은 이번 레포라 교수 연구에 앞서, 지난 2023년 MIT, 버클리 대학교(Berkeley College), 뉴욕 대학교(New York University)와 협력해 로봇 손을 통해 막대를 집어 올리고, 아이들의 장난감을 손에 들고 돌리는 등 다양한 기술을 선보였다. 이 모든 작업은 간단한 설정과 데스크톱 컴퓨터를 사용해 이뤄졌다










