
카네기멜런대학교, 구글 딥마인드, 워싱턴 대학교에서 공동으로 개발한 로코맨 솔루션 / 사진. 카네기멜런대학교
카네기멜런대학교 기계공학부와 구글 딥마인드 그리고 워싱턴 대학교 공동연구팀은 네 발로 걷는 로봇 로코맨을 개발 중에 있다고 밝혔다. 연구팀이 개발하는 해당 로봇은 네 발로 걷는 사족보행 로봇과 유사하게 설계된 장비로, 현재 이 로봇은 수색, 구조 임무를 주도하거나 건설 현장을 조사하고, 공장에서 부품을 특정 위치로 이동시키는 등 다양한 역할을 병행하고 있다. 이는 무게중심이 낮고, 경량 구조를 갖추고 있기에 가능한 것으로 복잡한 환경은 물론이거니와 가정용으로도 활용할 수 있을 것으로 기대된다. 다만 가정용으로 일상생활에서 사용하기에는 기능이 정교하지 못하고, 다양하지 못하다는 한계가 있었다.
이에 연구팀은 개 로봇 앞다리에 두 개의 맞춤형 경량 매니퓰레이터(로봇 팔)을 설치해 문을 열거나, 음료를 따르거나, 휴대폰을 충전기에 꽂거나 아이들이 어질러 놓은 장난감 등을 정리하는 등 다양한 기능을 갖춘 로봇을 개발하는 데에 성공했다고 밝혔다.
연구팀 관계자는 “많은 연구자들이 일부 작업에서 인간을 대체할 수 있는 휴머노이드 로봇에 집중하는 반면, 우리는 인간과 상호 보완적으로 협력할 수 있는 차별화된 로봇에 초점을 맞추고 있다”라며 “이번 연구는 개 로봇이 보다 다양한 기능을 갖춰 일상생활에도 활용할 수 있도록 하기 위해 마련됐다”라며 개발 동기를 설명했다.
고중량에 비용이 많이 드는 휴머노이드 로봇과 달리, 사족보행 로봇의 매니퓰레이터는 기존의 저비용 네 발 로봇에 추가하는 방식으로 탑재할 수 있으며 콤팩트하면서도 가벼워 제작이 용이하다는 특징을 갖추고 있다.
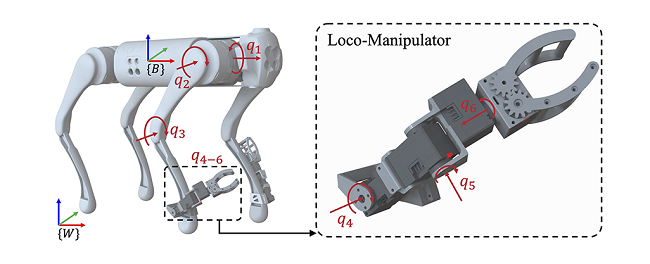
6차원 자세 조작을 수행하기 위해 다리를 로봇 팔의 일체형 구성 요소로 활용한 설계도 / 사진. 카네기멜런대학교
“우리는 네 개의 상용 서보를 사용하고 몇 가지 다른 부품을 3D 프린팅함으로써 이 같은 기능을 실현했다”라고 카네기 멜론 대학교 안전 AI 연구소 박사과정 학생이자 논문의 제1저자인 창이 린은 설명했다.
연구팀은 관련 하드웨어와 소프트웨어를 탑재한 로봇의 직접적인 활용 가능성을 확인하고자 유아 교육 센터에서 학습하는 유치원생 다섯 명에게 로코맨을 소개했다. 연구팀은 아이들에게 로봇이 어떻게 작동하는지, 로봇을 어디에 사용하는지 설명한 후, 아이들은 로봇과 상호작용할 기회를 가졌고 아이들은 로봇이 기능적인 측면에 만족했다는 후문이다. 현재 연구팀은 로코맨이 기존의 전신 제어기능에 고급 인식 및 지능 계획 기능을 통합해 자율적으로 작업을 수행할 수 있도록 개발을 확장 중에 있다.
연구팀 관계자는 “우리는 로코맨과 같은 로봇이 가정이나 보육시설에서 돕기 위해 향후 3년 이내에 준비될 것이라고 예상한다”라며 “가정용으로 도입이 이뤄질 경우, 부모가 아이를 돌보는 과정에서 발생되는 불필요한 시간을 줄이는 데에 기여할 것으로 기대된다”라고 언급했다.










