
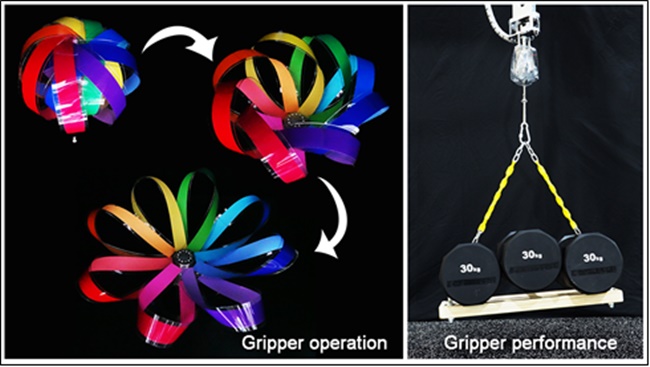
그리퍼의 동작 모습 및 성능 / 사진. 한국과학기술연구원
한국과학기술연구원(KIST, 이하 연구원)은 지난 9월 13일(수) 연구원 지능로봇연구단 송가혜 박사 연구팀이 연구원 항공우주공학과 이대영 교수팀과 함께 130g의 소재로 100kg 이상의 물체를 파지할 수 있는 직조 구조의 소프트 그리퍼를 공동 개발했다고 밝혔다.
연구원은 연구팀이 소프트 로봇 그리퍼의 적재 용량을 높이기 위해 새로운 소재를 개발하거나 구조를 보강하는 기존 방식과 달리 직물에서 착안한 새로운 구조를 적용했다고 설명했다. 연구팀이 주목한 직조 기술은 낱개의 실을 단단히 얽어 견고한 직물을 만드는 기술로, 무거운 물건을 안정적으로 지지할 수 있어 수 세기에 걸쳐 의류, 가방 및 산업용 직물 등에 활용되고 있다. 연구팀은 얇은 PET플라스틱 띠들이 직조 구조로 얽히고 풀어질 수 있도록 설계해 그리퍼를 제작했다.
연구원은 연구팀이 제작한 직조 구조 그리퍼가 130g의 무게로 100kg의 물체를 파지할 수 있다고 전했다. 같은 무게의 기존 그리퍼는 최대 20kg 이내를 들어 올릴 수 있었고, 동일한 무게를 들어 올릴 수 있었던 그리퍼는 무게가 100kg에 달하는 점을 고려했을 때 자체 무게 대비 적재 용량을 월등히 증가시키는 데 성공했다.
또한, 연구팀이 개발한 소프트 로봇 그리퍼는 재료 단가가 수천 원에 불과한 플라스틱을 사용하며, 다양한 형상과 무게의 물체도 파지가 가능한 범용 그리퍼로 활용할 수 있어 높은 가격 경쟁력을 가지고 있다. 뿐만 아니라 플라스틱 띠를 체결하는 방식만으로 소프트 로봇 그리퍼의 제작이 완료되기 때문에 제작공정이 10분 이내로 간단하고 교체 및 유지보수도 쉬워 공정 효율성이 뛰어나다.
한편, 연구팀이 주재료로 활용한 PET 외에도 탄성을 보유한 고무 및 화합물 등의 다양한 재료로도 제작할 수 있어 강한 파지 성능이 필요한 산업 및 물류 현장이나 극한 환경을 견뎌야 하는 다양한 환경에 적합한 그리퍼를 맞춤 제작, 활용할 수 있다.
연구원 송가혜 박사는 “이번에 개발된 직조 구조의 그리퍼는 소프트 로봇의 강점이 있으면서도 강성 그리퍼 수준으로 무거운 물체를 움켜쥘 수 있다. 또한, 동전부터 자동차까지 다양한 크기로 제작할 수 있으며, 얇은 카드부터 꽃에 이르기까지 여러 가지의 형태와 무게의 물체를 파지할 수 있어 소프트 그리퍼를 필요로 하는 산업, 물류, 가사 등의 분야에서 활용가능할 것으로 기대된다"라고 밝혔다.










