
MIT CSAIL가 촉각 감지 및 고유 인식 기능이 탑재된 로봇기술을 선보였다. (사진. MIT CSAIL)
MIT Computer Science & Artificial Intelligence Laboratory(이하 MIT CSAIL)가 촉각 감지 및 고유 인식 기능이 탑재된 소프트 로봇기술을 선보였다.
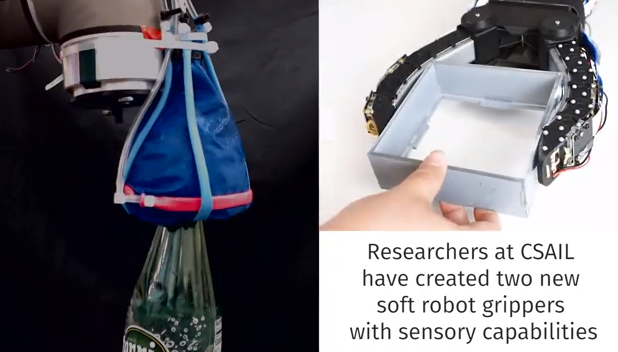
연구팀은 MIT와 하버드 대학교(Harvard University)의 이전 연구를 바탕으로, 비너스 플라이 트랩과 같은 물체를 무너뜨리고 무게를 100배 늘릴 수 있는 부드러운 로봇 그리퍼를 개발해냈다. 또한 이들은 섬세한 아이템을 픽업하고 분류 할 수 있는 센서를 추가한 ‘매직 볼 그리퍼’를 선보였다.
이 팀은 압력 변환기에 연결된 라텍스 풍선, 일명 풍선으로 만든 촉각 센서를 추가하는 한편, 지금까지 무거운 병부터 캔, 사과, 칫솔 및 쿠키 봉지에 이르기까지 그리퍼 센서를 테스트하는 과정을 거쳐왔다.
MIT 박사 및 연구원인 Josie Hughes은 “우리는 이들이 포장 및 리프팅과 같은 제조 환경의 다양한 응용 분야에 적용될 수 있는 새로운 소프트 센싱 방법을 제공하기를 희망한다”고 밝혔다.
풍선 형태의 촉각 센서
매직 볼 그리퍼는 부드러운 풍선으로 둘러싸인 구조로 제작됐다. 이때 풍선에 진공이 가해지면 종이 접기 구조가 물체 주위를 닫고 그리퍼를 해당 구조로 변형시킨다. 또한 센서에 힘이 가해지면 내부 압력이 변하게 되는데, 연구진들은 이 압력 변화를 측정해 식별 수준을 파악하기도 했다.
이 팀은 라텍스 센서 외에도 그리퍼가 강력하고 정밀한 이중성을 가질 수 있도록 피드백을 사용하는 알고리즘을 개발했다. 해당 테스트는 80%가 손상 없이 성공적인 결과를 나타낸 것으로 파악됐다.
향후 해당 연구진들은 새로운 센서 기술을 사용, 해상도와 적용 범위를 개선하는 데 집중할 것으로 보인다. 또한 계산 설계 및 재구성 방법을 사용해 방법론을 확장 가능하게 만들 계획이다. 이들은 새로운 센서를 사용해 확장성과 감도를 보여주는 유체 감지 피부를 제작하기를 희망하고 있다.
다양한 아이템 집어들 수 있는 ‘GelFlex’
부드러운 손가락은 광범위한 변형을 허용하지만 제어된 방식으로 사용하려면 풍부한 촉각 및 고유 감지 기능이 있어야 한다. 이에 연구진은 손가락의 변형을 매우 자세하게 포착하는 광각 ‘물고기 눈’ 렌즈가 내장된 카메라를 사용했다.
이들은 GelFlex를 만들기 위해 실리콘 소재를 사용, 부드럽고 투명한 손가락을 제작했다. 아울러 한 카메라는 손가락 끝 근처에, 다른 카메라는 손가락 가운데에 놓았다. 이후 손가락의 전면과 측면에 반사 잉크를 칠하고 후면에 LED 표시등을 추가했는데, 이로써 내부 어안 카메라가 손가락의 전면 및 측면 상태를 관찰할 수 있게 됐다.
이 팀은 신경망을 훈련시켜 피드백을 위해 내부 카메라에서 주요 정보를 추출했다. 한 신경망은 GelFlex의 굽힘 각도를 예측하도록 훈련됐고, 다른 신경망은 잡는 물체의 모양과 크기를 추정하도록 훈련됐다. 그리퍼는 루빅스 큐브, DVD 케이스 또는 알루미늄 블록과 같은 다양한 아이템을 집어들 수 있었다.
파지하는 동안의 평균 위치 오차는 0.77mm 미만으로, 사람의 손가락보다 뛰어난 성능을 발휘했다. 그러나 두 번째 테스트에서 그리퍼는 다양한 크기의 실린더와 박스를 파악하고 인식하는 데 어려움을 겪었지만, 80건의 시험 중 3건만 잘못 분류된 것으로 나타났다.
앞으로 이 팀은 고유 인식 및 촉각 감지 알고리즘을 개선하고 비전 기반 센서를 활용해 내장된 카메라로 얻을 수 있는 더 복잡한 손가락 구성(예를 들면 비틀림 또는 측면 굽힘)을 추정할 계획이다.









