
사진. NC State
노스캐롤라이나 주 주립대학 (North Carolina State University) 연구원들이 치타에 영감을 받아 ‘소프트 로봇’을 개발했다. 치타의 생체 역학에서 영감을 얻은 연구자들은 이전 세대의 소프트 로봇보다 단단한 표면이나 물에서 더 빠르게 움직일 수있는 새로운 유형의 소프트 로봇을 개발했는데, 새로운 소프트 로봇 공학은 물체를 섬세하게 잡거나 무거운 물체를 들어올리기에 충분한 힘을 가지고 있어 눈길을 끌었다.
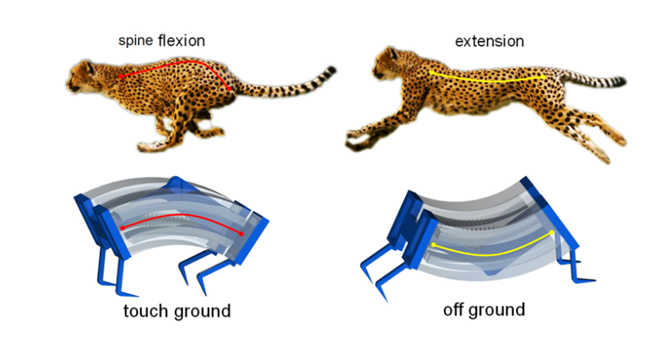
치타는 육상에서 가장 빠른 생물이며 척추의 굴곡으로 속도와 힘을 얻는다. 연구원들은 치타에 영감을 받아 스프링 구동형 안정적인 척추를 가진 소프트 로봇 유형을 만들었다. 또한 부드러운 실리콘 로봇을 연결하는 채널로 공기를 펌핑함으로써 안정적인 상태를 빠르게 전환했다. 두 상태 사이를 전환하면 상당한 양의 에너지가 방출돼 로봇이 지면에 빠르게 힘을 가할 수 있는데, 이를 통해 로봇은 표면을 가로 질러 질주할 수 있게 된다.
기존의 크롤러 소프트 로봇은 항상 땅에 닿아있었는데, 이는 속도를 제한하는 주요 요인이다. 아울러 지금까지의 빠른 소프트 로봇은 평평하고 단단한 표면에서 초당 최대 0.8 바디 길이의 속도로 움직일 수 있었다.
그러나 ‘LEAP(Amplified Performance for Amplified Performance)’의 새로운 종류의 소프트 로봇은 약 3Hz의 낮은 작동 주파수에서 초당 최대 2.7 바디 길이(3배 이상)의 속도에 도달할 수 있다. 이 로봇의 길이는 약 7㎝이며, 무게는 약 45g이다.
한편 연구진들은 LEAP 설계가 소프트 로봇의 수영 속도를 향상시킬 수 있음을 입증했다. LEAP 로봇은 피트가 아닌 핀을 부착해 이전에 가장 빠른 수영 소프트 로봇의 초당 0.7 바디 길이와 비교했을 때, 초당 0.78 바디 길이의 속도로 수영할 수 있었다.
연구 관계자는 “집게와 같이 함께 작동하는 여러 개의 소프트 로봇을 사용해 물체를 잡는 것을 시연했다”라며, “로봇이 가하는 힘을 조정함으로써 달걀처럼 섬세한 물체뿐만 아니라 무게가 10kg 이상인 물체를 들어 올릴 수 있었다”고 밝혔다.









