터크, 경사 스위치부터 IIoT 플랫폼까지 신제품 공개
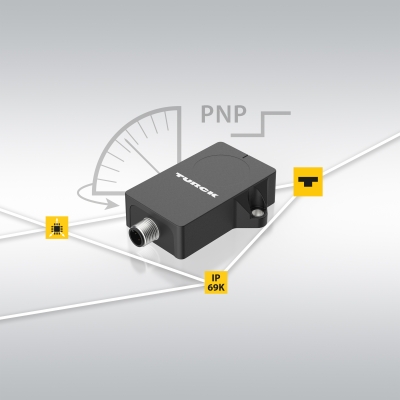
B1N180V-QR20 / 사진. 터크 산업 자동화 전문기업 터크(Turck)가 경사 스위치와 IO-Link 마스터, 유량 센서, 유도형 링 센서, IIoT 플랫폼 등 산업 현장의 디지털화와 스마트 자동화를 지원하는 신제품 및 솔루션을 잇달아 공개했다. 이번에 선보인

휴대용 이동수단 「Winglet」, 이동이 즐거워진다!
·토요타의 차세대 이동수단 “Winglet”
토요타 자동차 주식회사는 8월 1일, 파트너 로봇 시리즈 최신모델로 서서 타는 스타일의 2륜형 이동 지원 로봇 「Winglet(윙 렛)」을 발표했다.
Winglet은 ‘안전하게 어디든 자유롭게 이동을 즐길 수 있는 사회 실현’에 공헌하는 목적으로 개발되었으며, 토요타의 파트너 로봇 중에서도 모빌리티를 지원하는 로봇 군에 속하는 것으로, 건물이나 실내에서의 이동을 지원하기 위해서 개발되었다.
Winglet은 보행자가 걷는 수준과 비슷한, 최대 6km/h까지의 속력을 낼 수 있다.
토요타에 따르면, Winglet은 전기를 통해 작동하는 것으로 한번 충전 시 5㎞까지 사용할 수 있고, 한 바퀴 회전은 물론 운전자가 몸을 기울이는 쪽으로 방향 전환이 가능하다.
뿐만 아니라 운전자의 자세를 감지해 안정적인 자세를 유지할 수 있게 하며, 약간의 압력으로 쉽게 멈출 수 있게 되어있다.
토요타 관계자는 연령층에 관계없이 누구나 연습을 통해 탑승법을 쉽게 배울 수 있고, 공항이나 쇼핑몰 등에서 유용하게 쓰일 뿐 아니라 엘리베이터 같은 협소한 공간에서도 사용이 용이하다고 전했다.
신제품 발표회에 참석한 토요타사의 중역 우치야마 다케시는 “이번 발명은 과학적으로 큰 성과일 뿐 아니라 노년층에게 도움을 주고 친환경적인 제품을 생산하겠다는 회사의 전략에도 부응하는 것”이라며 기대의 뜻을 표현했다.
·휴대 가능한 작은 사이즈와 가벼운 몸체가 특징
Winglet은 스티어링 유닛의 길이에 따라 3종류가 제작되었고, 모두 10kg 미만이다.
경량이 가장 적게 나가고, 작게 접을 수 있어 운반하기 쉬운 S 타입, 양손으로 잡을 수 있는 그립이 붙은 긴 스티어링 유닛이 있어 세그웨이의 콤팩트 판의 느낌이 나는 L 타입, 무릎 정도까지에 그립이 없는 스티어링 유닛을 갖추어 조작감이 양자의 중간적인 M 타입이 그것이다.
Winglet은 전기 모터가 내장된 보디와 2개의 바퀴, 사용자의 움직임을 지속적으로 모니터하는 내부 센서로 이루어져 있다.
보디의 면적은 A3 용지 크기에 불과해 공간을 크게 차지하지 않는 것이 장점이다.
독특한 평행 링크 시스템을 적용해 사용자가 몸을 움직여 발생하는 무게 배분에 따라 가속과 후진, 회전이 가능하다.

Winglet Type S

Winglet Type M

Winglet Type L
·센서로 유저의 자세 체크하고 제어
다리를 두는 스텝 아래의 타이어와 휠 안쪽에 소형 구동유닛이 배치되어 있고, 360mm 길이의 트레드(좌우의 타이어의 간격)는 어깨 폭과 같은 수준이다.
구동유닛은 서보모터로 새롭게 개발된 유성 감속기를 사용하였다. 타이어 지름은, 바리어 프리 단차의 20mm를 주파할 수 있는 것을 조건으로, 150mm로 만들어졌고 폭은 60mm이다.
차체 프레임은 좌우의 타이어가 휠 안쪽의 소형 구동유닛을 독자 개발한 평행 링크 바의 앞, 뒤에 각각 2개씩 연결하였다.
Winglet은 중심 이동으로 가고 싶은 방향을 컨트롤하는데, 타이어가 비스듬하게 되었을 때 평행 링크 바가 작동하며 타이어와 평행사변형의 형태를 만드는 구조이다.
선회는 자동차와 같이 타이어를 회전하는 것이 아니라, 돌고 싶은 방향으로 기울여 작동한다.
다리를 싣고 있는 스텝은 좌우로 독립해 움직이므로, 각각 비스듬하게 기운다.
또, 전원, 제어, 자세 센서 등의 전장 유닛도 중앙부에 집약되고 있어 위쪽에서 보았을 때의 투영 면적을 어느 정도 억제하는 것에 성공하였다.
스텝의 높이는 165mm로 매우 낮고, 유저의 신장이 하차시와 비교해 올려보는 만큼 단번에 높아져, 혼잡시에도 주위의 보행자에게 위압감이나 불편함을 주는 일은 거의 없다.
승강은 매우 간단한데, 탈 때는 전원을 넣고 한쪽 발부터 싣고, 내릴 때는 하차 버튼을 누른다.
스텝의 외측이나 전후에는 아무것도 없고, 뒤로 내디딜 때도 다리가 걸릴 염려가 없으며, 경우에 따라 곧바로 뒤로 내릴 수도 있다.
센서로 자세를 체크해서 제어하고 있는 물구나무 서기 이륜 제어이므로, 전진. 후퇴는 중심 이동으로 행한다.
브레이크가 없기 때문에, 진행 방향에 대해서 반대로 중심 이동을 하고 제동을 건다.
비탈길을 오를 때도, 각도에 맞추어 스텝이 수평이 되기 때문에 뒤로 떨어질 염려가 없다.
또, 좌우 선회도 중심 이동으로 이루어져 회전주행 등도 간단하게 할 수 있다.
사람과의 충돌의 위험성에 대해서도 제대로 연구되고 있다. 물구나무 서기 이륜 제어를 위해 지렛대의 원리를 이용하여 적은 힘으로도 제동이 가능하다.

B1N180V-QR20 / 사진. 터크 산업 자동화 전문기업 터크(Turck)가 경사 스위치와 IO-Link 마스터, 유량 센서, 유도형 링 센서, IIoT 플랫폼 등 산업 현장의 디지털화와 스마트 자동화를 지원하는 신제품 및 솔루션을 잇달아 공개했다. 이번에 선보인

사진. LS일렉트릭 LS일렉트릭이 차세대 IPC 기반 제어 플랫폼 ‘SU-CM70’을 공개하며 Software Defined Automation 시대를 겨냥한 자동화 플랫폼 전략을 본격화했다. SU-CM70은 초고속·다축 모션 제어와
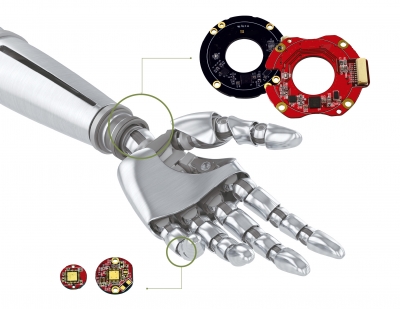
사진. 엔알티센서스 기존 엔코더 구조의 한계 개선 로봇 산업의 고도화와 함께 관절 단위의 정밀 제어 기술이 핵심 경쟁력으로 부상하며, 고해상도 엔코더에 대한 수요가 빠르게 증가하고 있다. 특히 휴머노이드 로봇에 대한 관심도 증가와 협동로봇의 확산으로 제한된 공간 내에서
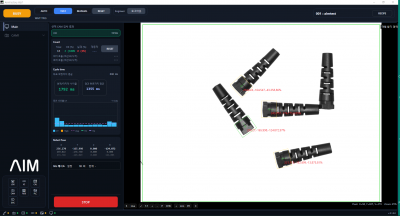
사진. 에이아이엠 자동화 솔루션 기업 에이아이엠(이하 AIM)이 로봇과 비전을 하나의 플랫폼으로 통합한 신규 소프트웨어 ‘AIMFactoryCore’를 앞세워 제조 자동화 시장 공략에 나선다. 기존 비전 중심 시스템에서 한 단계 확장된 구조를 통해


하비스탕스(주) 임승재 대표이사 / 사진. 하비스탕스(주) 하비스탕스(주)는 적층제조 기술을 기반으로 맞춤형 로봇 그리퍼 서비스 그립팜(GriPalm)을 제안하며 로봇 자동화 시장에서 경쟁력을 확대하고 있다. 동사는 씨메스로보틱스(주) 적용 사례를 통해 경량 EOAT(
생성형 AI와 휴머노이드가 산업계의 화두로 떠오르면서 제조 현장에서도 AI 활용 방안에 대한 관심이 높아지고 있다. 그러나 실제 공장에서는 화려한 기술보다 안정성과 생산성이 우선된다. (주)티로보틱스는 반도체 공정용 로봇으로 축적한 기술력을 기반으로 모바일 로봇과 피지






